It Does Not Always Have to Be a Humanoid Robot
Mythomorphic Design as an Option and a Perspective
Oliver Bendel, FHNW School of Business
Social robots are often designed in a humanoid or zoomorphic manner. In addition, there are object-like designs that attempt to avoid imitation of living beings. Nevertheless, humanoid or zoomorphic features may still appear, such as human-like eyes or an animal-like tail. Less common, but clearly present, is a design perspective that can be described as mythomorphic. In this case, humans or animals do not serve, or do not directly serve, as models; instead, extraterrestrials, fantasy figures, or mythological beings are used as inspiration. This contribution first addresses what can be understood by mythomorphic design. It then collects, describes, and classifies examples of social robots that follow this approach. Subsequently, an ontological, aesthetic, and ethical discussion is conducted, with opportunities and risks identified in each case. It becomes apparent that mythomorphic design can be understood as a distinct perspective within the broader design space of social robotics.
1 Introduction
Robots are often designed in a humanoid or zoomorphic (animaloid) manner [23]. Some are object-like, while others are object-like but possess social features. As humanoid robots, they are sometimes bipedal, unless one is satisfied with wheeled platforms or stationary figures [11]. They have arms and hands and an upright body. Their head has a face with eyes and a mouth, which frequently exhibits mimetic capabilities. As zoomorphic robots, they are often quadrupeds with an elongated body, modeled for example on dogs and cats [10]. Their head has a face with eyes and a mouth as well as ears. Both forms can be intended for dealing with humans or with animals [6, 7].
Within Bendel’s five-dimension model for social robots, this fulfills the criterion of representing (aspects of) living beings [6, 7]. The other dimensions are also relevant, above all interaction with living beings and communication with living beings. Humanoid robots often possess natural language capabilities, while zoomorphic robots emit sounds and noises, ranging from barking to meowing. In both approaches, there are models that can move or physically manipulate objects. The dimension of proximity determines the distance between humanoid and zoomorphic robots and living beings, while the dimension of utility concerns task and purpose.
Less common, but clearly present, is a design perspective that can be described as mythomorphic. In this case, humans or animals are not, or not directly, modeled; instead, extraterrestrials, fantasy figures, or mythological beings serve as inspiration. All of these are products of human imagination – since no extraterrestrial life forms have been discovered to date. Now, many beings in science fiction novels and films, in works of fantasy, as well as in texts such as the “Metamorphoses” by Ovid [22], resemble either humans or animals, or combine features of both, as in the case of the Minotaur. However, there are also figures that push the boundaries of imagination and give form or shape to what is barely conceivable, as well as possibilities of interaction and communication. With regard to social robots, it therefore seems meaningful to explore whether this can be described as a distinct perspective, because this approach deliberately and purposefully establishes distinctions from humanoid and zoomorphic design, for example in order to dampen expectations or arouse curiosity.
The present contribution poses the following research question: Is mythomorphic design of social robots best understood as a distinct design category or rather as a cross-cutting dimension within the broader design space? First, the paper addresses what can be understood by mythomorphic design, including a differentiation from humanoid and zoomorphic design. It then collects, describes, and situates examples of social robots with mythomorphic design within the five-dimension model. Subsequently, a philosophical discussion – specifically an ontological, aesthetic, and ethical one – is conducted, with opportunities and risks identified in each case. It becomes apparent that mythomorphic design of social robots can be interpreted as a distinct perspective within the overall design landscape. A summary with an outlook concludes the paper.
To address the research question, the paper distinguishes between different dimensions of robot design, including source of inspiration (biological vs fictional), degree of stylization, and interactional function. This distinction aims to avoid conceptual ambiguity and situate mythomorphic design more precisely within existing approaches in social robotics.
2 Foundations of Social Robots and Philosophical Perspectives
This section lays the foundations for social robots and social robotics. The design of robots and social robots is then discussed, using a classification by Remmers [23]. The philosophical disciplines of ontology, aesthetics and ethics are then briefly explained. These seem particularly relevant in the given context.
2.1 Social Robots and Social Robotics
Social robots are sensorimotor machines that have been created for dealing with humans or animals [7, 15]. They can be characterized along five dimensions, namely interaction with living beings, communication with living beings, proximity to living beings, representation of (aspects of) living beings, and – at the center – utility for living beings [7]. Under a broad understanding of the term, software robots such as certain chatbots, voice assistants, and social bots may also be included, with a relativization of the sensorimotor aspect. The discipline that studies and develops social robots is social robotics.
Robotics, or robot engineering, deals with the design, construction, control, production, and operation of robots [15]. Its subfield of social robotics, with roots in the 1940s and 1950s and a boom since around 2000, focuses on (semi-)autonomous machines that interact and communicate with humans and animals – here, among other things, artificial intelligence is required – and that are sometimes realized in humanoid or animaloid form and are mobile [6]. A subarea is “emotional robotics” or “social-emotional robotics”, with its focus on emotions (which robots display and recognize) and empathy (which robots display). In this context, the discipline of artificial or machine consciousness is of importance. If machines are to be capable of morally adequate decisions, machine ethics is required [1, 5, 28].
2.2 Design of Social Robots
Remmers distinguishes in robotics overall between humanoid, animaloid, and object-like robots [23]. According to him, humanoid robots have a physical form that is similar to the human body. A typical humanoid robot therefore has arms, legs, a head, and a torso. Accordingly, animaloid robots are characterized by a physical form that corresponds to the body of an animal. Animaloid robots thus orient themselves toward the body of an animal, with a wide variety ranging from insects to quadrupeds and even aerial and aquatic animals. Beyond general body shape, the forms and functions of human or animal organs can, according to Remmers, serve as models in detail, for example in the design of the end effector as a hand-like gripper or as a suction cup modeled on marine animals [23]. Mechanical-morphic design can be regarded as object-like or as a separate category. This classification represents one possible approach and has been complemented and refined by more recent frameworks that consider interactional, functional, and perceptual aspects in greater detail. In this paper, it is used as a heuristic starting point rather than as an exhaustive model. However, its coarse granularity limits the possibility to capture fine-grained interactional dynamics.
According to Remmers, the classification of a robot as humanoid or animaloid in the narrower sense initially refers only to the physical form of the robot and its components. One advantage of design orientations based on human-like or animal-like forms lies in the fact that robots can be deployed more efficiently in environments adapted to humans or animals. In this respect, humanoid and animaloid design approaches are particularly relevant for the development of social robots, insofar as they are intended to operate in social spaces and contexts. Further advantages arise for human-robot interaction [23].
In a broader understanding of “humanoid” or “animaloid”, additional features beyond external physical appearance can contribute to a human-like or animal-like appearance of a robot [23]. Design elements such as eyes, face, or voice are described as anthropomorphic or zoomorphic, since they are oriented toward characteristics of living organisms. According to Remmers, this also includes corresponding motor, cognitive, or communicative capabilities that contribute significantly to an overall humanoid or animaloid impression of a robot. Finally, anthropomorphic or zoomorphic design may also include the construction of a context that influences interaction independently of the material properties of the robot, such as naming or a “personal” story attributed to the robot [23]. One might also speak of storytelling in this context [31].
The motor capabilities described by Remmers can be assigned to the dimension of interaction in the five-dimension model, the communicative capabilities to that of communication [7]. With the breakthrough of large language models (LLMs) and multimodal large language models (MLLMs), the cognitive dimension has become even more important. In the five-dimension model, cognition is primarily present in the dimensions of communication and representation, but it could also be assigned to its own sixth dimension. Social robots analyze and evaluate their environment and decide – if one allows this term – on verbal or motor actions.
In the following, a distinction is made between different analytical dimensions: (1) source of reference (biological vs fictional), (2) degree of abstraction or stylization, and (3) interactional and functional characteristics. Mythomorphic design primarily concerns the first dimension but may intersect with the others.
Further articles by Prof. Dr. Oliver Bendel:



2.3 Ontology, Aesthetics, and Ethics
Ontology, as a discipline of philosophy, is the study of being or of what is [20]. It investigates the categories, structures, and modes of existence of entities and their relations. Using a classical term, it is also referred to as “general metaphysics”. Ontological questions include: What is the world made of? What is a human being? What is an animal? What is, in relation to humans and animals, a machine? While the term “ontology” emerged only in the Middle Ages, interest in the subject matter of “general metaphysics” has existed since antiquity, beginning with Heraclitus (the mutability of all that is) and Parmenides (the immutability of being). Somewhat later, Democritus explored the being of matter and formulated the first atomistic theory [3, 27].
As a philosophical discipline, aesthetics is, among other things, the study of beauty and art [9]. Alexander Gottlieb Baumgarten is regarded as the founder of the discipline, which is concerned with cognition through the senses (and not through the intellect, as in the case of logic). In “Of the Standard of Taste” (1745), David Hume argued that the recognition of beauty above all requires practice. According to Immanuel Kant’s “Critique of Judgment” (1790), aesthetic judgments, despite their subjective origin, lay claim to universal validity. In contemporary philosophy, beauty as an object has lost relevance, which appears by no means justified.
Ethics, as a discipline of philosophy, is the study of the good and the bad. Aristotle is regarded as one of its founders [2]. Ethics can be pursued in a descriptive or empirical manner and in a normative manner. Applied ethics refers to delimited fields of application and gives rise to area ethics. Information ethics examines the moral implications of the dissemination and use of computer technologies. AI ethics that emerged within or alongside it has meanwhile become an independent field of research. Robot ethics addresses moral questions that arise in the deployment of robots. It has turned to issues such as responsibility and rights of robots, for which no compelling arguments for the existence of such capacities or properties can be provided. Machine ethics focuses on artificial morality, especially of (semi-)autonomous systems [1, 5, 28]. It can be assigned to information and technology ethics or regarded as a counterpart to human ethics, such that it would not be an area ethics but a new “primary ethics”.
3 Mythomorphic Design in Social Robots
Mythomorphic design can be interpreted not only as a distinct category but also as a dimension that cuts across different forms of robot design, particularly in terms of fictionalization and narrative reference. The design of social robots is based on different reasons and goals. In humanoid and zoomorphic robots, external features are adopted that are familiar from everyday life. This can be advantageous for developers (orientation, simplicity, proven solutions) and for users (usability, acceptance). In both approaches, the design has proven itself in nature. In the case of humanoid robots, as discussed, this is also culturally significant, particularly for manipulating and using artifacts of all kinds. They can move along the same paths as humans, in the same buildings, on the same escalators and in the same elevators, and can use our tools and furniture. This is especially important for general-purpose robots, which can at least partly be counted among social robots [12, 13]. As Remmers has indicated, this also applies to some extent to zoomorphic robots, since artifacts have also been created for them [23].
Mythomorphic design of social robots initially dispenses with the imitation of familiar and everyday characteristics of living beings. Instead, it models extraterrestrials (alienoid design), fantasy figures, or mythological beings – as they appear, for example, in the works of Homer or Ovid, that is, in Greek and Roman antiquity [22]. In doing so, it draws on existing descriptions and representations or on the designers’ own creativity. It may well be the case that the features are familiar, but not from everyday reality; rather, they may stem from fiction in literature or film. The result is figures that seem familiar or are entirely new and can be associated with their own stories.
Human imagination is, in a certain sense, both boundless and limited. Most works of science fiction, fantasy, and mythology design figures that clearly, approximately, or faintly resemble humans or animals in their appearance as well as in interaction and communication – one might think of the Vulcans or Klingons from “Star Trek”. Sometimes representations succeed that push the limits, as in “Arrival” (2016) or “Solaris” (novel from 1961, film from 1972) – but even these must ultimately be accessible to human thinking and feeling. In mythomorphic design, one will often discover humanoid or zoomorphic elements. However, it is likely the goal of many developers to consciously and deliberately deviate from these and to invent structures and extremities that are unique and alien. A new direction emerges, just as science fiction or fantasy represents a new direction (with a long tradition) that is rarely confused with reality.
Humanoid robots encompass a wide spectrum [13]. NAO, Pepper, and Alpha Mini exhibit a caricature-like design, Furhat and Einstein a realistic one, and Harmony, Erika, and Sophia a hyperrealistic one. Zoomorphic robots could be classified in a similar way. AIBO has a caricature-like appearance across the different models in the series. Toy robots modeled on cats are usually more or less realistic. Caricature-like or stylized designs may overlap with mythomorphic elements, but they are not identical, as stylization concerns form, whereas mythomorphic design concerns the source of reference. Alternatively, one might say that they vary the idea of the robot itself in the mirror of the humanoid. This also occurs in a different way when mechanical and natural aspects are combined. An example is Alter3 with a silicone face and metallic arms, whose hands have silicone skin [29], thereby combining humanoid and mechanomorphic design. This already gives rise to initial ontological and aesthetic aspects – ethical ones will follow.
Mythomorphic design has hardly been systematically explored in the literature and is often mentioned only in passing, for example in the context of anthropomorphization or the uncanny valley. In the latter context, Duffy refers to Mori’s view that the robot’s form should be visibly artificial but nevertheless interesting and appealing: “A great many science fiction and fantasy manga and anime stories use this strategy.” [17] Boer and Bewley speak of “otherness” that goes beyond typical humanoid and zoomorphic design [14]. Coeckelbergh is of the opinion that a social robot can only function successfully if there are sufficient commonalities that form a basis for shared meaning. An alien “social” robot “would not be regarded as social by us, humans, since it would lack all these relations to human meaning” [16]. Vallée and Aubergé characterize the Mirokaï as friendly and classify them as humanoid [26].
Importantly, mythomorphic design does not only concern visual appearance but also extends to interactional patterns, communication styles, and narrative framing, which together shape how users perceive and engage with the robot.
4 Examples of Robots with Mythomorphic Design
This section collects examples of social robots with mythomorphic design. The aim is less to provide a comprehensive overview than to present typical implementations. Each model is described in a standardized manner, insofar as the information is available, including name, manufacturer, country of origin, status as prototype or product, date of market introduction, purpose or utility, model variants (for example male and female), proximity to the user (at a distance, in close proximity, or directly on the body), and features of the design, in particular with regard to appearance, as well as interaction (including movement, degree of autonomy, and manipulation capabilities) and communication. In this way, the five-dimension model is also covered. The potential sixth dimension of cognition is likewise mentioned where applicable.
The selection is the result of an Internet and literature search and is limited to four models, namely Mirokaï, Leonardo, Furby, and Cozmo. It follows illustrative criteria rather than representativeness, aiming to cover different degrees of fictionalization, interaction styles, and application contexts. Pleo, a robot dinosaur representing a fictional young Camarasaurus, that is, a creature from a long-past prehistoric world, was excluded because it can be regarded as zoomorphic; for the same reasons, Robopanda was excluded, an interactive companion in the form of a panda with programmable personality traits or story content. Moxie, a social robot intended for children with animated, cartoon-like facial features and a head and body shape that are more reminiscent of figures from fiction than of real models, was also not considered, since it can nevertheless be classified as humanoid. Robots such as Paro and Muflin or Cupboo AI Robotic Pet (Boo Boo) are often assessed as zoomorphic and likewise do not belong to the mythomorphic category in the narrower sense, because they reflect real species – in this case the harp seal and the guinea pig.
4.1 Mirokaï
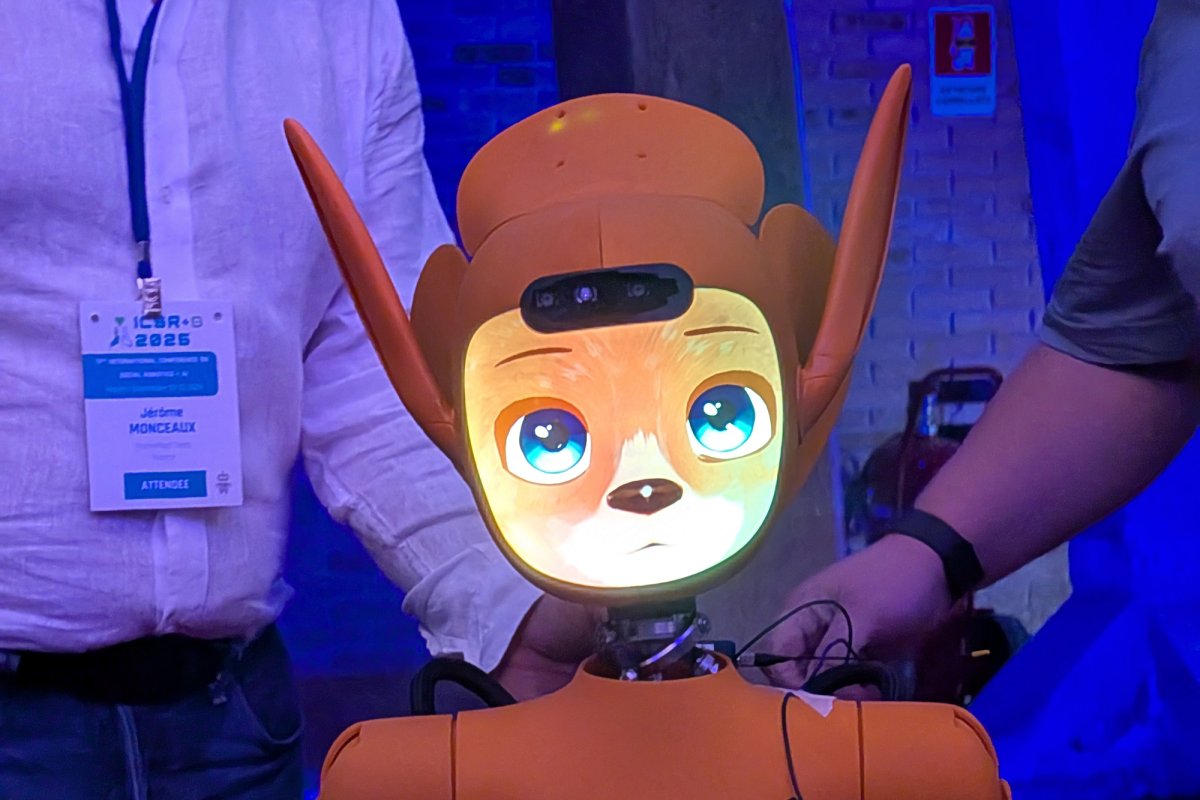
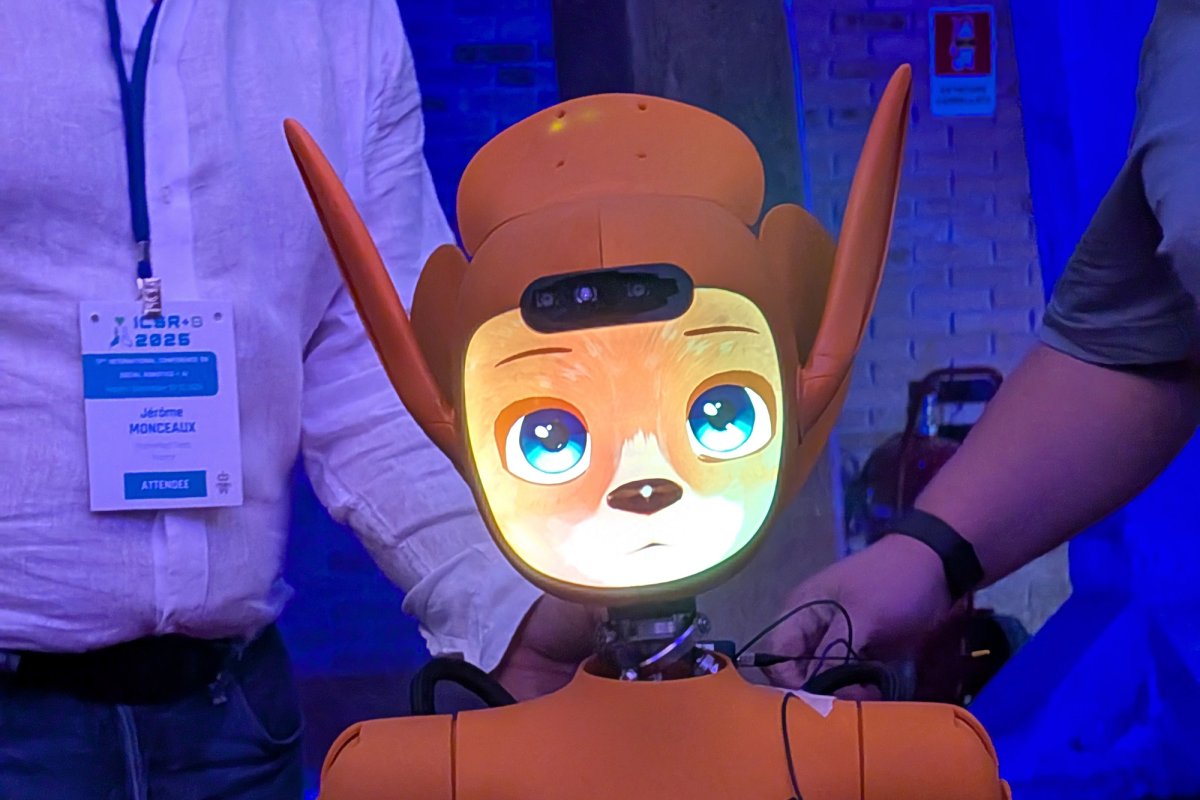
The Mirokaï models are social robots developed by the French company Enchanted Tools. They are commercial products and have been deployed in initial applications since 2023. The Mirokaï are designed for social interaction in (semi-)public spaces such as hospitals, care facilities, hotels, or reception areas. Their purpose lies in greeting, accompanying, informing, and emotionally addressing users. They exist in several color variants, with two genders (Miroka and Miroki) and distinguishable personalities. Interaction takes place in close proximity to the user, usually at a distance of one to two meters, without direct physical contact. In terms of design, the robot is clearly mythomorphic: it exhibits a fantastical, non-realistic appearance that is neither clearly humanoid nor zoomorphic. A large, animated face with strongly exaggerated expressive features and long, pointed ears shape the overall impression, complemented by simple arm and head movements (see Figure 1). Complex manipulation of objects is partially possible, for example the operation of devices specifically developed for the Mirokaï, such as a soap-bubble machine. Communication is based on spoken language, visual facial expressions, and screen-based animations. Cognitive capabilities are evident in AI-supported navigation, speech recognition, and a limited adaptation to social situations. With the help of storytelling – among other things on the website – the origin of the Mirokaï is explained as coming from a distant planet.
4.2 Leonardo
Leonardo (or Leo) is a social robot developed for research purposes at the MIT Media Lab in the US. It was developed as a prototype starting around 2004 in collaboration with Stan Winston Studio and is used exclusively for research. The aim is to investigate social interaction, emotional communication, and learning processes between humans and robots. Leonardo was never commercialized and has no model variants or gender differentiation. Interaction takes place in very close proximity to the user, often at table height and clearly designed for face-to-face situations. In terms of design, Leonardo is a deliberately mythomorphic fantasy creature with large eyes, fur, ears, and a highly expressive face. The figure is not realistic and cannot be clearly assigned to any existing living being. The upper body, head, and arms are movable and primarily serve gestural and emotional expressiveness rather than functional manipulation. Communication takes place through eye contact, facial expressions, gestures, and simple vocalizations, while spoken language plays a subordinate role. The cognitive dimension is a central component of the system and includes learning mechanisms, emotion models, and adaptive social responses.

4.3 Furby
Furby is a social robot invented by Tiger Electronics and distributed by the US company Hasbro. It is designed as a toy and was first released in 1998. To this day, it has appeared in numerous generations and is still commercially available. Furby is primarily intended for private use in the household. Its purpose lies in entertainment, social play, and the simulation of relationship and attachment. Numerous variants exist in terms of color, design, and behavioral profile, but without fixed gender assignment, although hair can be styled according to stereotypically female or male patterns. Furby is used in direct physical contact, for example on the lap, in the hand, or on a table. In its design, it is clearly mythomorphic: it does not represent a real animal but a fictional creature with its own identity and artificial language (see Figure 2). Its movement capabilities are limited to the head, eyes, ears, and mouth, complemented by reactions to touch, sounds, and changes in position. Communication takes place via the artificial language Furbish in the versions after 1998, later supplemented by simple forms of human language, as well as through emotional sounds. Cognitively, Furby exhibits simple adaptive behavioral changes that respond to interaction frequency and usage patterns.

4.4 Cozmo
Cozmo is a social robot developed by the now-defunct US company Anki. It was introduced as a product in 2016; production has since been continued by Digital Dreams Lab (now again operating under the name Anki; see here). Cozmo is designed for playful social interaction, entertainment, and the low-threshold learning of social and technical concepts. With Vector, there exists a color and functional variant that includes speech recognition. Interaction usually takes place at arm’s length, occasionally in very close proximity on a table or the floor (see Figure 3). In terms of design, Cozmo is highly stylized and cinematic and is reminiscent of animated science fiction figures such as WALL·E (body) and Eve (eyes) from the film “WALL·E” (2008). It therefore clearly belongs to the realm of mythomorphic design. Cozmo moves in a controlled or autonomous manner on tracks, can lift and stack small illuminated cubes, and uses head and lifting movements to regulate emotional expression. Communication takes place via animated eyes – designed by a Pixar employee – displayed on a screen, as well as via sounds, and only rarely (after input via the app) via natural language. It can learn names and reproduce them upon recognizing a person. Cognitive capabilities include object and face recognition, as well as simple decision logic and limited learning mechanisms. Cozmo is among the best-selling social robots [7].
4.5 Comparison Using the Five-Dimension Model
Across all examples, it becomes evident that interactional behavior and communication patterns play a central role in how mythomorphic design is perceived, often more so than static appearance alone. In the following, the Mirokaï, Leonardo, Furby, and Cozmo are compared along the five dimensions of the aforementioned model (interaction, communication, representation, proximity, utility) as well as the additionally introduced sixth dimension of cognition. The comparison is conducted systematically and coherently, rather than by discussing each model in isolation.
In the first dimension, interaction, functional differences become apparent. The Mirokaï move autonomously in space, use simple arm and head movements, and are capable of object manipulation. Leonardo is limited to expressive movements of the head, arms, and upper body, which primarily serve emotional interaction rather than practical actions. Cozmo, together with Miroka and Miroki, exhibits the most pronounced manipulation capabilities, albeit on a small scale: it can recognize, lift, and stack cubes and combines these actions with emotionally expressive movements. Furby has no genuine manipulation capabilities; instead, it reacts through movements of individual body parts to touch, position, and sounds. Interaction here is primarily reactive and body-centered.
The second dimension, communication, is central to all four robots, but implemented in different ways. The Mirokaï models possess natural language capabilities, visual facial expressions, and screen-based animations and are thus strongly oriented toward multimodal communication. Leonardo communicates predominantly nonverbally through eye contact, facial expressions, gestures, and vocalizations. Furby uses an artificial language with emotional sounds, supplemented in later models by simple human words, thereby creating its own communicative world. Cozmo largely dispenses with spoken language – except when speech sequences are added or invoked during face recognition – and instead relies on animated eyes and sounds which, together with arm and head movements, are strongly emotionally connoted (its “brother” Vector features speech recognition and speech output). Overall, mythomorphic design frequently goes hand in hand with nonverbal or only limited verbal communication.
In the third dimension, representation, all four robots clearly depart from real existing humans or animals and are thus mythomorphic, albeit to different degrees. The Mirokaï and Leonardo are the most clearly designed as fantasy beings whose body structure, proportions, and facial features do not correspond to any real species. While the female and male versions of the Mirokaï are more reminiscent of figures from contemporary animation and fantasy culture, Leonardo is designed as a deliberately alien yet emotionally legible being. Furby likewise possesses an autonomous fictional identity with its own species logic which, like the Mirokaï, can be culturally interpreted as extraterrestrial or fairy-tale-like. Cozmo is the most strongly technically abstracted; its design recalls fictional robots from animated films such as “WALL·E” and almost completely dispenses with biological terrestrial references, aside from the simulation of emotions [7]. Overall, the spectrum ranges from organic-fantastical (Leonardo, Furby) to technical-stylized (Cozmo).
In the fourth dimension, proximity, the models differ considerably. Furby is designed for immediate physical contact and is held, stroked, and moved. Leonardo also operates in very close proximity, usually at table height, but without physical contact and clearly focused on dialogical situations. Cozmo interacts at short distances, typically on a table or the floor, with occasional approaches, for example during games, in controlled or autonomous form. The Mirokaï maintain the greatest distance by comparison. They are designed for interaction in space and, in autonomous mode, usually remain one to two meters away from the user. They thus occupy an intermediate position between personal and public proximity, which is also readily used for performances such as those during ICSR 2025 in Naples.
The fifth dimension, utility, is expressed differently across the individual prototypes or products. The Mirokaï models pursue a clear functional purpose in service, accompaniment, and social support in care-related or public contexts. Leonardo serves exclusively research purposes and the generation of knowledge about social cognition and interaction. Furby is designed for entertainment, play, and emotional attachment in the private sphere. Cozmo combines entertainment with learning and experimentation functions and is aimed at a young audience interested in playful programming. Despite these differences, all four robots fulfill social functions by generating relationships, attention, and interaction.
The sixth dimension introduced here, cognition, is present in all the robots examined, but to very different degrees. Leonardo possesses complex cognitive models, since learning, emotion, and social adaptation are explicit research subjects. The Mirokaï use AI-based methods for speech recognition and output (namely an LLM), navigation, and situation-dependent responses, but remain limited to application-oriented cognition. Cozmo features object recognition, face recognition, and simple decision logic with limited learning capability. Furby exhibits only simple adaptive behavioral changes that are more simulated than cognitively grounded. The cognitive dimension is therefore by no means uniformly developed in mythomorphic robots, but ranges from rudimentary adaptation to complex research models.
The comparison suggests that mythomorphic design does not define a homogeneous category but operates across multiple dimensions, particularly representation and communication [24, 8]. This supports the interpretation of mythomorphic design as a cross-cutting dimension rather than a clearly bounded class. This indicates that differences in interaction experience are likely driven less by appearance alone than by the combination of design and behavior, which should be explored in future HRI studies.
5 Ontological, Aesthetic, and Ethical Discussion
The mythomorphic design of social robots raises fundamental ontological, aesthetic, and ethical questions. These cannot be answered in isolation but are closely intertwined with the robot’s interaction and communication, its form, its proximity to humans, as well as its purpose and context of use. In this way, the five dimensions of the model are also addressed. In this section, the three philosophical perspectives are first developed separately, also taking into account the dimensions (including the proposed sixth). They are then brought together in order to answer the research question.
5.1 Ontological Perspective
From an ontological perspective, mythomorphic design primarily concerns the question of the being and status of social robots. Humanoid and zoomorphic robots explicitly orient themselves toward real existing living beings and thereby invite ontological attributions that go beyond their actual technical status. They appear as deficient humans or animals, as imitations of earthly life, which gives rise to questions of consciousness, sentience, or even rights. Mythomorphically designed robots counter this with a different strategy. They deliberately dispense with the direct copying of real humans or animals and instead position themselves as fictional beings. This creates an apparent categorical distinction: the mythomorphic robot is neither human nor animal, but a machine with an invented form, for which there is at most a counterpart in imagination or in extraterrestrial worlds.
However, this interpretation is not without problems. Several objections can be raised against treating mythomorphic design as a distinct category. First, many fictional figures that inspire such designs – such as Vulcans or Klingons in “Star Trek” – are arguably still humanoid. Yet even in these cases, specific features (e.g., ears or cranial structures) introduce a degree of otherness that exceeds simple human likeness. This suggests that mythomorphic elements can be present even within broadly humanoid forms. Second, the term “humanoid” is sometimes used in a broad sense that includes not only humans but also artificial beings and extraterrestrials. While this may be pragmatically useful, it risks obscuring meaningful differences in design and perception. Conceptualizing mythomorphic design as a distinct dimension helps to articulate these differences more precisely. Third, attraction and affective response are often tied to biological familiarity. As designs move further away from human likeness, they may challenge established patterns of perception and engagement. In this respect, mythomorphic design can also be understood as a way of exploring the boundaries of familiarity and otherness in human-robot interaction. Taken together, these considerations support the view that mythomorphic design is more appropriately understood as a dimension rather than a strictly bounded category.
The ontological distinction constitutes a significant opportunity. It can help to dampen false expectations on the part of users and to avoid confusion between machine and living being. The robot does not appear as an imperfect copy but as an autonomous artifact with its own formal language and modes of expression. At the same time, this strategy also entails risks. Despite their fictional character, mythomorphic figures can evoke strong emotional responses and trigger new projections. Anthropomorphization cannot be eliminated in this way, especially since distinct terrestrial features are usually present [23]. Storytelling, personal traits, and expressive communication can lead to the attribution of a quasi-subjective status. Ontological clarity is therefore not automatic but depends to a large extent on how representation, communication, and cognition are designed within the framework of the extended five-dimension model. In practice, these ontological attributions are not determined by appearance alone but emerge in interaction, where behavioral cues, responsiveness, and communication play a decisive role.
5.2 Aesthetic Perspective
The aesthetic perspective focuses on the design itself, on perception, attractiveness or beauty, and expression. Mythomorphic design opens up considerable creative freedom. Developers are not bound to biological plausibility or earthly anatomical models but can freely design forms, proportions, and movements, guided by pure imagination or by scientific insights related to outer space and corresponding imaginaries. This enables a conscious departure from realism and thus also an avoidance of the so-called uncanny valley, which is particularly problematic in humanoid robots with realistic or hyperrealistic ambitions [21]. Otherness, stylization, and fantasy can be aesthetically productive, arouse curiosity, and promote playful openness in interaction with the robot.
At the same time, this aesthetic freedom is ambivalent. Mythomorphic robots can be perceived as beautiful, cute, fascinating, or original, but also as ugly, repulsive, alienating, kitschy, or inappropriate, as in the case of Furby. Aesthetic judgments are subjective but, as classical aesthetics has shown, lay claim to a certain universality [30]. In addition, strongly stylized designs are subject to fashions and may age more quickly than functionally restrained designs. There is also the risk that aesthetic features inspired by fantasy worlds or distant realms may overshadow functional or communicative requirements. What is decisive, therefore, is the interplay of representation, proximity, and interaction: otherness can be appealing as long as it does not turn into distance or rejection. Empirical HRI studies suggest that such interplay is strongly influenced by timing, movement, and responsiveness, which shape aesthetic experience beyond static design features.
5.3 Ethical Perspective
The ethical perspective asks about the moral implications of mythomorphic design in social robots. A central problem of social robotics – addressed in information ethics and robot ethics – lies in the potential for deception: such machines simulate empathy and emotions, and humans may attribute properties to them that they cannot possess, including not only empathy and emotions [25] but also moral responsibility and ethical rights [4]. Mythomorphic design can have a relieving function here. By being recognizably fictional, the robot weakens the impression of a sentient being. Responsibility remains more or less clearly with the humans who develop, operate, and deploy the robot. Machine ethics can experiment with the social robot as a moral agent, which may enrich human morality.
At the same time, new ethical challenges arise. Mythomorphic robots can also deliberately generate emotional bonds, for example in play, care, or companionship. The instrumentalization of emotions therefore remains a relevant risk, regardless of the specific form of design. Anthropomorphization cannot be fully resolved either, as already noted from the ontological perspective. Moreover, aesthetically appealing designs such as those of the Mirokaï, or endearing designs such as Leonardo and Furby, can push critical questions about data use, surveillance, or dependency into the background. Information ethics and robot ethics are required here to ensure a responsible handling of communication, proximity, and utility as described in the five-dimension model, but they quickly reach their limits without legal support. Not least, machine ethics may fail in its experiments with the moral agent and relativize or trivialize human morality. These ethical issues are closely tied to interaction design, as the perception of empathy, agency, or intention arises primarily through dynamic engagement rather than appearance alone.
5.4 Bringing the Perspectives Together
When the ontological, aesthetic, and ethical considerations are brought together, it becomes clear that mythomorphic design of social robots can be interpreted as a dimension within the broader design space that intersects with existing design approaches. It possesses independent legitimacy insofar as it creates recognizable distinctions, enables design innovation, and partially reduces ethical risks. At the same time, it is not self-sustaining. Its opportunities unfold only if it is applied deliberately, designed reflectively, and implemented in a context-sensitive manner. Mythomorphic design is therefore neither mere play nor a simple compromise, but a strategic design option that has its justification and significance in the field of social robotics, provided that its ontological, aesthetic, and ethical implications are taken seriously. The research question is thus answered accordingly. The analysis suggests that mythomorphic design is more appropriately understood as a cross-cutting dimension rather than a strictly bounded category. This implies that mythomorphic design does not replace existing categories but intersects with them.
6 Summary and Outlook
This article has addressed the question of whether mythomorphic design in social robots can be understood as a meaningful design perspective within a broader and more differentiated design space. On the basis of descriptions of selected examples and ontological, aesthetic, and ethical analyses, it has been shown that mythomorphic social robots can create recognizable distinctions through their deliberately fictional form, open up creative design spaces, and at the same time mitigate certain risks, in particular false expectations – although anthropomorphization cannot be eliminated entirely. Mythomorphic design thus proves to be a justified and meaningful alternative that should not be understood as a deficient deviation, but as a distinct design perspective within a broader and differentiated design space, provided it is applied in a reflective manner.
At the same time, the article has limitations. The empirical basis is narrow, not only because a selection was made, but also because there are generally few examples of mythomorphic design. The article primarily adopts philosophical perspectives and largely refrains from a systematic design-technical analysis – relevant considerations in this regard stem from Dunne and Raby or Forlano [18, 19] – as well as from informatics-oriented analyses, for example of software architectures, AI models, or implementation issues. Design aspects were taken into account only insofar as they were philosophically reflected in the aesthetic perspective. Likewise, empirical user studies or technical feasibility analyses could not be included, although such studies are also scarcely available for mythomorphic design. In addition, the conceptual framework proposed here remains exploratory and would benefit from further theoretical refinement and empirical validation.
For the future, it can be assumed that mythomorphic design will gain in importance, especially in contexts where social robots are intended to manage expectations in a targeted manner, foster emotional openness, and at the same time maintain clear distance from human and animal models – incidentally also from gender stereotypes and prejudices related to ethnicity or age groups. This development is being stimulated by computer games, metaverses, avatars of chatbots, and newly emerging works of science fiction and fantasy. Mythomorphic robots could become carriers of new narrative forms, interaction concepts, and social roles and thus contribute to further developing social robotics beyond the mere imitation of earthly living beings.
References
[1] Anderson, M., Anderson, S. L. (eds.): Machine Ethics. Cambridge University Press, Cambridge (2011).
[2] Aristotle: The Nicomachean Ethics. Penguin Books, London (2020).
[3] Barnes, J.: The Presocratic Philosophers. Routledge, London (1982).
[4] Bendel, O.: Do robots have rights? Edison, 2/2018, p. 71.
[5] Bendel, O. (ed.): Handbook of Machine Ethics. Springer VS, Wiesbaden (2019).
[6] Bendel, O.: Social robots. In: Gabler business lexicon. Springer Gabler, Wiesbaden (2020). Link
[7] Bendel, O. (ed.): Social robots. Springer Gabler, Wiesbaden (2021).
[8] Bendel, O.: Love dolls and sex robots in unproven and unexplored fields of application. Paladyn - Journal of Behavioral Robotics 12, 1-12 (2021). Link
[9] Bendel, O.: Beauty. In: Gabler Business Dictionary. Springer Gabler, Wiesbaden (2023). Link
[10] Bendel, O.: Robotic quadrupeds. In: Gabler Business Dictionary. Springer Gabler, Wiesbaden (2024). Link
[11] Bendel, O.: Robotic bipeds. In: Gabler Business Dictionary. Springer Gabler, Wiesbaden (2024). Link
[12] Bendel, O.: The Universal Robot of the 21st Century. In: Seibt, J. et al. (eds.): Social Robots With AI, IOS Press, Amsterdam (2025), pp. 399-410.
[13] Bendel, O.: Humanoid robots. In: Gabler Business Dictionary. Springer Gabler, Wiesbaden (2025). Link
[14] Boer, L., Bewley, H.: Reconfiguring the appearance and expression of social robots by acknowledging their otherness. In: Proceedings of DIS'18, ACM (2018), pp. 667-677.
[15] Christaller, T. et al: Robotics. Springer, Berlin (2013).
[16] Coeckelbergh, M.: Three responses to anthropomorphism in social robotics. International Journal of Social Robotics, 14(10), 2049-2061 (2022).
[17] Duffy, B. R.: Anthropomorphism and the social robot. Robotics and Autonomous Systems 42(3-4), 177-190 (2003).
[18] Dunne, A.; Raby, F.: Speculative Everything. MIT Press, Cambridge, MA (2013).
[19] Forlano, L.: Posthumanism and Design. She Ji 3(1), 16-29 (2017). Link
[20] Jacquette, D.: Ontology. Routledge, London (2014).
[21] Mori, M.: The Uncanny Valley. Energy 7, 33-35 (1970).
[22] Ovid: Metamorphoses. Penguin Classics, London (2004).
[23] Remmers, P.: Humanoid, animaloid and material robots. In: Bendel, O. (ed.): Social robots. Springer Gabler (2021), pp. 213-230.
[24] Rogge, A.: I Was Made for Love. In: Bendel, O. (ed.): Machine love. Springer Gabler (2020), pp. 55-78.
[25] Schulze, H. et al: Social robots, empathy and emotions. Zenodo (2021). Link
[26] Vallée, R., Aubergé, V.: Recherches sur l'interaction Humain-Robot avec les robots Mirokaï. ScreenDay 2024.
[27] Vlastos, G.: Ethics and physics in Democritus. The Philosophical Review 54(6), 578-592 (1945).
[28] Wallach, W., Allen, C.: Moral Machines. Oxford University Press, Oxford (2009).
[29] Yoshida, T. et al.: From text to motion: grounding gpt-4 in a humanoid robot "alter3". Frontiers in Robotics and AI 12 (2025).
[30] Zangwill, N.: "Aesthetic Judgment". In: The Stanford Encyclopedia of Philosophy (Fall 2024). Link
[31] Zaro, J. J., Salaberri, S.: Storytelling. Heinemann, Munich (1995).