Es muss nicht immer ein humanoider Roboter sein
Mythomorphe Gestaltung als Option und Perspektive
Oliver Bendel, Hochschule für Wirtschaft FHNW
Soziale Roboter sind oft humanoid oder zoomorph gestaltet. Zudem gibt es dinghafte Gestaltung, bei der versucht wird, eine Nachahmung von Lebewesen zu vermeiden. Allerdings können humanoide oder zoomorphe Merkmale vorkommen, etwa menschlich wirkende Augen oder ein tierlicher Schwanz. Weniger üblich, aber durchaus vorhanden ist eine weitere Richtung, die mythomorph genannt werden kann. Hier sind nicht oder nicht direkt Menschen oder Tiere das Vorbild, sondern Außerirdische, Fantasyfiguren oder mythologische Figuren. In diesem Beitrag wird zuerst darauf eingegangen, was unter mythomorpher Gestaltung verstanden werden kann. Dann werden Beispiele für soziale Roboter mit dieser Ausrichtung gesammelt, beschrieben und eingeordnet. Sodann findet eine ontologische, ästhetische und ethische Diskussion statt. Dabei werden jeweils Chancen und Risiken genannt. Es zeigt sich, dass mythomorphes Design als eigenständige Perspektive innerhalb des breiteren Gestaltungsraums der Sozialen Robotik verstanden werden kann.
1. Einleitung
Roboter sind oft humanoid oder zoomorph (animaloid) gestaltet [23]. Einige sind dinghaft, wieder andere sind dinghaft, haben aber soziale Merkmale. Als humanoide Roboter sind sie manchmal Zweibeiner, wenn man sich nicht mit Rollen oder Standfiguren begnügt [11]. Sie verfügen über Arme und Hände und einen aufrechten Körper. Ihr Kopf hat ein Gesicht mit Augen und Mund, das häufig mimische Fähigkeiten aufweist. Als zoomorphe Roboter sind sie oft Vierbeiner mit einem länglichen Körper, etwa Hunden und Katzen nachgebildet [10]. Ihr Kopf hat ein Gesicht mit Augen und Maul sowie Ohren. Beide Formen können für den Umgang mit Menschen oder Tieren gedacht sein [6, 7].
Im Fünf-Dimensionen-Modell für soziale Roboter von Bendel wird damit das Kriterium der Abbildung (von Merkmalen) von Lebewesen erfüllt [6, 7]. Auch die anderen Dimensionen sind relevant, vor allem die Interaktion mit Lebewesen und die Kommunikation mit Lebewesen. Humanoide Roboter haben oft natürlichsprachliche Fähigkeiten, zoomorphe geben Töne und Laute von sich, vom Bellen bis zum Miauen. Bei beiden Richtungen gibt es Modelle, die sich bewegen oder etwas physisch manipulieren können. Die Dimension der Nähe bestimmt über den Abstand zwischen humanoiden und zoomorphen Robotern und Lebewesen, die des Nutzens über Aufgabe und Zweck.
Weniger verbreitet, aber eindeutig vorhanden ist eine Gestaltungsperspektive, die als mythomorph bezeichnet werden kann. Hier werden nicht oder nicht direkt Menschen oder Tiere nachgebildet, sondern Außerirdische, Fantasyfiguren oder mythologische Figuren. Sie alle sind – bis heute wurden keine außerirdischen Lebensformen entdeckt – Produkte unserer Fantasie. Nun ähneln in Science-Fiction-Büchern und -Filmen, in Werken der Fantasy sowie in Schriften wie den „Metamorphosen“ [22] nicht wenige Wesen entweder Menschen oder Tieren – oder vereinen Merkmale von beiden, wenn man an den Minotaurus denkt. Es gibt aber auch solche, die die Grenzen unserer Fantasie ausloten und dem kaum noch Vorstellbaren eine Gestalt oder eine Form geben sowie Möglichkeiten von Interaktion und Kommunikation. Im Hinblick auf soziale Roboter erscheint es daher sinnvoll zu untersuchen, ob dies als eigenständige Perspektive beschrieben werden kann, da dieser Ansatz bewusst und gezielt Abgrenzungen zum humanoiden und zoomorphen Design schafft, etwa um Erwartungen zu dämpfen oder Neugier zu wecken.
Der vorliegende Beitrag stellt die folgende Forschungsfrage: Ist die mythomorphe Gestaltung sozialer Roboter als eigenständige Kategorie zu verstehen oder eher als eine querliegende Dimension innerhalb des breiteren Gestaltungsraums? Es wird zuerst darauf eingegangen, was unter mythomorpher Gestaltung verstanden werden kann. Dabei findet eine Abgrenzung zu humanoider und zoomorpher Gestaltung statt. Danach werden Beispiele für soziale Roboter mit mythomorpher Gestaltung gesammelt, beschrieben und im Fünf-Dimensionen-Modell eingeordnet. Dann findet eine philosophische, konkret eine ontologische, ästhetische und ethische Diskussion statt. Dabei werden jeweils Chancen und Risiken genannt. Es zeigt sich, dass die mythomorphe Gestaltung sozialer Roboter als eigenständige Perspektive innerhalb der gesamten Gestaltungslandschaft interpretiert werden kann. Eine Zusammenfassung mit Ausblick schließt den Beitrag ab.
Zur Beantwortung der Forschungsfrage unterscheidet der Beitrag zwischen verschiedenen Dimensionen des Roboterdesigns, darunter die Inspirationsquelle (biologisch vs. fiktional), der Grad der Stilisierung sowie die interaktionale Funktion. Diese Unterscheidung soll begriffliche Unschärfen vermeiden und die mythomorphe Gestaltung präziser innerhalb bestehender Ansätze der Sozialen Robotik verorten.
2. Grundlagen sozialer Roboter und philosophische Perspektiven
In diesem Abschnitt werden Grundlagen für soziale Roboter und Soziale Robotik gelegt. Dann wird auf die Gestaltung von Robotern und sozialen Robotern eingegangen, wobei eine Unterteilung von Remmers herangezogen wird [23]. Dann werden in aller Kürze die philosophischen Disziplinen der Ontologie, der Ästhetik und der Ethik erklärt. Diese erscheinen im gegebenen Kontext besonders relevant.
2.1 Soziale Roboter und Soziale Robotik
Soziale Roboter sind sensomotorische Maschinen, die für den Umgang mit Menschen oder Tieren geschaffen wurden [7, 15]. Sie können über fünf Dimensionen bestimmt werden, nämlich die Interaktion mit Lebewesen, die Kommunikation mit Lebewesen, die Nähe zu Lebewesen, die Abbildung von (Aspekten von) Lebewesen sowie – im Zentrum – den Nutzen für Lebewesen [7]. Bei einem weiten Begriff können neben Hardwarerobotern auch Softwareroboter wie gewisse Chatbots, Sprachassistenten und Social Bots dazu zählen, unter Relativierung des Sensomotorischen. Die Disziplin, die soziale Roboter erforscht und hervorbringt, ist die Soziale Robotik.
Die Robotik oder Robotertechnik beschäftigt sich mit dem Entwurf, der Gestaltung, der Steuerung, der Produktion und dem Betrieb von Robotern [15], ihr Teilgebiet der Sozialen Robotik mit Wurzeln in den 1940er- und 1950er-Jahren und einem Boom seit ca. 2000 mit (teil-)autonomen Maschinen, die mit Menschen und Tieren interagieren und kommunizieren – hier ist u.a. die Künstliche Intelligenz gefragt – und zuweilen humanoid oder animaloid realisiert und mobil sind [6]. Ein Teilbereich ist die „emotionale Robotik“ oder „sozial-emotionale Robotik“ mit ihrem Fokus auf Emotionen (welche Roboter zeigen und erkennen) und Empathie (welche Roboter zeigen). In diesem Zusammenhang ist die Disziplin des Künstlichen oder Maschinellen Bewusstseins von Bedeutung. Wenn die Maschinen zu moralisch adäquaten Entscheidungen fähig sein sollen, ist die Maschinenethik gefragt [1, 5, 28].
2.2 Gestaltung sozialer Roboter
Remmers unterscheidet in der Robotik insgesamt humanoide, animaloide und dingliche (dinghafte) Roboter [23]. Humanoide Roboter haben nach ihm eine physische Gestalt, die der menschlichen Körpergestalt gleichartig ist. Ein typischer humanoider Roboter hat folglich Arme, Beine, einen Kopf und einen Rumpf. Entsprechend gelte für animaloide Roboter, dass ihre physische Gestalt der Körpergestalt eines Tiers entspreche. Sie orientieren sich also am Körper eines Tiers, wobei in diesem Bereich eine große Vielfalt von Insekten über Vierbeiner bis hin zu Luft- und Wassertieren gegeben sei. Über die allgemeine Körpergestalt hinaus können nach Remmers im Detail die Formen und Funktionen menschlicher oder tierlicher Organe als Vorbild dienen, beispielsweise bei der Gestaltung des Endeffektors als handähnlicher Greifer oder auch als Saugnapf nach dem Vorbild von Meerestieren [23]. Die mechanomorphe Gestaltung kann man als dinghafte auffassen oder als eigene Kategorie. Diese Klassifikation stellt einen möglichen Ansatz dar und wurde durch neuere Rahmenwerke ergänzt und verfeinert, die interaktionale, funktionale und wahrnehmungsbezogene Aspekte detaillierter berücksichtigen. In dieser Arbeit wird sie als heuristischer Ausgangspunkt verwendet und nicht als erschöpfendes Modell. Ihre grobe Granularität schränkt jedoch die Möglichkeit ein, fein abgestufte interaktionale Dynamiken abzubilden.
Die Kategorisierung eines Roboters als humanoid oder animaloid im engeren Sinne bezieht sich nach Remmers zunächst nur auf die physische Gestalt des Roboters und deren Bestandteile. Ein Vorteil der gestalterischen Orientierung an menschen- oder tierähnlichen Formen bestehe darin, dass Roboter effizienter in Umgebungen eingesetzt werden können, die Menschen oder Tieren angepasst sind. In dieser Hinsicht seien humanoide und animaloide Gestaltungsansätze besonders relevant bei der Entwicklung sozialer Roboter, sofern sie in sozialen Räumen und Kontexten operieren sollen. Weitere Vorteile ergeben sich für die Mensch-Roboter-Interaktion [23].
In einem weiteren Verständnis von „humanoid“ bzw. „animaloid“ können neben der äußerlichen physischen Gestalt nach Remmers weitere Merkmale zu einer menschlichen oder tierlichen Erscheinung eines Roboters beitragen [23]. Gestaltungselemente wie Augen, Gesicht oder Stimme würden als anthropomorph bzw. zoomorph bezeichnet, da sie sich an Merkmalen lebendiger Organismen orientieren. Dazu zählen nach Remmers außerdem entsprechende motorische, kognitive oder kommunikative Leistungen, die deutlich zu einem humanoiden oder animaloiden Gesamtbild eines Roboters beisteuern. Zur anthropomorphen oder zoomorphen Gestaltung könne schließlich auch die Konstruktion eines Kontextes gezählt werden, der eine Interaktion unabhängig von den materiellen Eigenschaften des Roboters beeinflusst, wie beispielsweise eine Namensgebung oder eine „persönliche“ Geschichte, die dem Roboter zugeordnet wird [23]. Man mag hier auch von Storytelling sprechen [31].
Die motorischen Leistungen bei Remmers können in die Dimension der Interaktion im Fünf-Dimensionen-Modell eingeordnet werden, die kommunikativen in die der Kommunikation [7]. Die kognitive Dimension ist mit dem Durchbruch der großen Sprachmodelle (Large Language Models, LLMs) und der multimodalen großen Sprachmodelle (Multimodal Large Language Models, MLLMs) noch wichtiger geworden. Im Fünf-Dimensionen-Modell ist das Kognitive vor allem in den Dimensionen der Kommunikation und der Abbildung vorhanden, könnte aber auch einer eigenen sechsten Dimension zugewiesen werden. Soziale Roboter analysieren und evaluieren ihre Umgebung und entscheiden sich, wenn man dieses Wort zulassen will, zu verbalen oder motorischen Aktionen.
Im Folgenden wird zwischen verschiedenen analytischen Dimensionen unterschieden: (1) Referenzquelle (biologisch vs. fiktional), (2) Grad der Abstraktion oder Stilisierung und (3) interaktionale und funktionale Eigenschaften. Mythomorphe Gestaltung betrifft in erster Linie die erste Dimension, kann sich jedoch mit den anderen überschneiden.
Weitere Artikel von Prof. Dr. Oliver Bendel:




2.3 Ontologie, Ästhetik und Ethik
Die Ontologie ist als Disziplin der Philosophie die Lehre vom Sein bzw. vom Seienden [20]. Es wird das Wesen von Entitäten bestimmt, an sich und in ihrem Verhältnis zu anderen Entitäten. Man spricht mit dem klassischen Begriff auch von „allgemeiner Metaphysik“. Fragen der Ontologie können sein: Woraus besteht die Welt? Was ist der Mensch? Was ist das Tier? Was ist, im Verhältnis zum Menschen und zum Tier, die Maschine? Während der Begriff der Ontologie erst im Mittelalter entstanden ist, gilt dem Gegenstand der „allgemeinen Metaphysik“ seit der Antike das Interesse, beginnend mit Heraklit (Wandelbarkeit alles Seienden) und Parmenides (Unwandelbarkeit des Seins). Etwas später geht Demokrit dem Sein der Materie auf den Grund und formuliert die erste Atomtheorie [3, 27].
Die Ästhetik ist als Disziplin der Philosophie u.a. die Lehre von Schönheit und Kunst [9]. Alexander Gottlieb Baumgarten gilt als Begründer der Disziplin, die sich mit der Erkenntnis mithilfe der Sinne (und nicht des Verstands wie im Falle der Logik) beschäftigt. David Hume führt in „Über die Regel des Geschmacks“ („Of the Standard of Taste“) von 1745 aus, dass es für die Erkenntnis von Schönheit vor allem Übung braucht. Nach Immanuel Kants „Kritik der Urteilskraft“ (1790) haben ästhetische Urteile trotz ihrer subjektiven Herkunft einen Anspruch auf Allgemeingültigkeit. In der zeitgenössischen Philosophie hat die Schönheit als Objekt an Relevanz verloren, was keineswegs gerechtfertigt erscheint.
Die Ethik ist als Disziplin der Philosophie die Lehre vom Guten und Bösen. Als einer ihrer Begründer gilt Aristoteles [2]. Man kann sie in deskriptiver bzw. empirischer Weise und in normativer Weise treiben. Die angewandte Ethik bezieht sich auf abgrenzbare Themengebiete und bildet die Bereichsethiken aus. Die Informationsethik untersucht die moralischen Implikationen der Verbreitung und Nutzung von Computertechnologien. Die in ihr oder neben ihr entstandene KI-Ethik ist inzwischen ein eigenes Forschungsfeld. Die Roboterethik wendet sich moralischen Fragen zu, die sich beim Einsatz von Robotern ergeben. Sie hat Verantwortung und Rechte von Robotern thematisiert, wobei für die Existenz beider Fähigkeiten oder Eigenschaften keine stichhaltigen Argumente angeführt werden können. Die Maschinenethik hat die künstliche Moral zum Gegenstand, vor allem von (teil-)autonomen Systemen [1, 5, 28]. Sie kann Informations- und Technikethik zugeordnet oder als Pendant zur Menschenethik angesehen werden, so dass sie keine Bereichsethik, sondern eine neue „Hauptethik“ wäre.
3. Mythomorphe Gestaltung bei sozialen Robotern
Der Gestaltung sozialer Roboter liegen unterschiedliche Gründe und Ziele zugrunde. Bei humanoiden und zoomorphen Robotern werden äußerliche Merkmale aufgegriffen, die einem im Alltag bekannt und vertraut sind. Dies kann zum einen für den Entwickler von Vorteil sein (Orientierung, Einfachheit, Bewährtheit), zum anderen für den Benutzer (Bedienung, Akzeptanz). Bei beiden Richtungen hat sich das Design in der Natur bewährt. Bei humanoiden Robotern ist es zudem, wie ausgeführt, für die Kultur von Bedeutung, für das Manipulieren und Benutzen von Artefakten aller Art. Sie können sich auf den gleichen Wegen bewegen wie wir, in den gleichen Gebäuden, auf den gleichen Rolltreppen und in den gleichen Aufzügen, können unsere Werkzeuge und Möbel verwenden. Dies ist insbesondere bei Allzweckrobotern wichtig, die man zumindest zum Teil zu den sozialen Robotern rechnen kann [12, 13]. Wie Remmers angedeutet hat, gilt dies zum Teil auch für zoomorphe Roboter, denn auch für sie wurden Artefakte geschaffen [23].
Mythomorphe Gestaltung sozialer Roboter verzichtet zunächst auf die Nachahmung bekannter und vertrauter Merkmale von Lebewesen aus dem Alltag. Sie bildet Außerirdische (alienoide Gestaltung), Fantasyfiguren oder mythologische Figuren – wie sie etwa in den Werken von Homer oder Ovid vorkommen, also in der griechischen und römischen Antike [22] – nach. Dabei bedient sie sich vorhandener Beschreibungen und Abbildungen oder eigener Kreativität. Es kann durchaus vorkommen, dass die Merkmale bekannt und vertraut sind, aber eben nicht aus der Realität des Alltags, sondern zum Beispiel aus der Fiktion von Literatur und Film. Es resultieren Figuren, die man zu kennen scheint, oder die ganz neu sind und mit eigenen Geschichten verknüpft werden können.
Die menschliche Fantasie ist in gewisser Hinsicht ebenso grenzenlos wie beschränkt. Die meisten Werke von Science-Fiction, Fantasy und Mythologie entwerfen Figuren, die deutlich, annähernd oder schwach an Menschen oder Tiere erinnern, in ihrem Äußeren sowie in Interaktion und Kommunikation – man denke an die Vulkanier oder die Klingonen aus „Star Trek“. Manchmal gelingt eine Darstellung, die an die Grenzen geht, wie in „Arrival“ (2016) oder „Solaris“ (Buch von 1961, Film von 1972) – aber auch diese muss sich letztlich menschlichem Denken und Fühlen erschließen. Man wird in mythomorpher Gestaltung oft humanoide oder zoomorphe Elemente entdecken. Es dürfte aber das Ziel vieler Entwickler sein, bewusst und gezielt davon abzuweichen und Strukturen und Extremitäten zu erfinden, die einzigartig und fremdartig sind. Es ergibt sich eine neue Richtung, so wie auch Science-Fiction oder Fantasy eine neue Richtung (mit langer Tradition) ist, die selten mit der Realität verwechselt wird.
Humanoide Roboter umfassen ein weites Spektrum [13]. NAO, Pepper und Alpha Mini weisen ein karikaturenhaftes Design auf, Furhat und Einstein ein realistisches, Harmony, Erika und Sophia ein hyperrealistisches. Zoomorphe Roboter könnte man ähnlich einteilen. AIBO hat ein karikaturenhaftes Äußeres, über die unterschiedlichen Modelle der Reihe hinweg. Spielzeugroboter, die Katzen nachgebildet sind, sind meist mehr oder weniger realistisch. Karikaturhafte oder stilisierte Gestaltungen können sich mit mythomorphen Elementen überschneiden, sind jedoch nicht identisch, da sich die Stilisierung auf die Form bezieht, während mythomorphes Design die Referenzquelle betrifft. Man könnte alternativ sagen, dass sie die Idee des Roboters selbst vor dem Spiegel des Humanoiden variieren. Dies passiert in anderer Weise auch, wenn mechanische und natürliche Aspekte kombiniert werden. Ein Beispiel dafür ist Alter3 mit Silikonhaut im Gesicht und metallischen Armen, die Hände mit Silikonhaut haben [29], womit humanoides und mechanomorphes Design kombiniert wäre. Damit ergeben sich erste ontologische und ästhetische Aspekte – ethische werden folgen.
Die mythomorphe Gestaltung wird in der Literatur kaum systematisch erforscht und oft nur beiläufig erwähnt, etwa im Kontext der Anthropomorphisierung oder des Uncanny Valley. Duffy verweist in letzterem Zusammenhang auf die Ansicht von Mori, dass die Roboterform zwar sichtbar künstlich sein, aber dennoch interessant und ansprechend aussehen sollte: „A great many science fiction and fantasy manga and anime stories use this strategy.“ [17] Boer and Bewley sprechen vom „otherness“, das das typische humanoide und zoomorphe Design hinter sich lässt [14]. Coeckelbergh ist der Meinung, dass ein sozialer Roboter nur dann erfolgreich funktionieren kann, wenn es genügend Gemeinsamkeiten gibt, die eine Grundlage für eine gemeinsame Bedeutung bilden. Ein außerirdischer „sozialer“ Roboter „would not be regarded as social by us, humans, since it would lack all these relations to human meaning“ [16]. Vallée und Aubergé charakterisieren die Mirokaï als freundlich und stufen sie als humanoid ein [26].
Wichtig ist, dass mythomorphes Design nicht nur das visuelle Erscheinungsbild betrifft, sondern sich auch auf Interaktionsmuster, Kommunikationsstile und narrative Rahmungen erstreckt, die gemeinsam prägen, wie Benutzer den Roboter wahrnehmen und mit ihm interagieren.
4. Beispiele für Roboter mit mythomorphem Design
In diesem Abschnitt werden Beispiele für soziale Roboter mit mythomorphem Design gesammelt. Es geht weniger um eine vollständige Darstellung, mehr darum, typische Umsetzungen zu zeigen. Jedes Modell wird einheitlich beschrieben, sofern die Informationen verfügbar sind, mit Namen, Hersteller, Herstellerland, Status als Prototyp oder Produkt, Datum des Markteintritts, Zweck bzw. Nutzen, Varianten des Modells (etwa männlich und weiblich), Nähe zum Benutzer (in Abstand von ihm, in Nähe zu ihm, direkt am Körper) und Merkmalen in der Gestaltung, insbesondere in Bezug auf Äußeres, sowie Interaktion (samt Bewegung, Autonomiegrad und Manipulationsmöglichkeit) und Kommunikation. Damit wird auch das Fünf-Dimensionen-Modell abgedeckt. Die potenzielle sechste Dimension der Kognition wird, wo gegeben, ebenfalls erwähnt.
Die Auswahl ist Resultat einer Internet- und Literaturrecherche und beschränkt sich auf vier Modelle, nämlich Mirokaï, Leonardo, Furby und Cozmo. Sie folgt illustrativen Kriterien statt Repräsentativität und zielt darauf ab, unterschiedliche Grade der Fiktionalisierung, Interaktionsstile und Anwendungskontexte abzudecken. Pleo, ein Roboterdinosaurier, der einen fiktionalen jungen Camarasaurus darstellt, also eine Kreatur aus einer längst vergangenen prähistorischen Welt, wurde ausgeschlossen, da er als zoomorph gelten kann, aus den gleichen Gründen Robopanda, ein interaktiver Begleiter in Form eines Pandas mit programmierbaren Persönlichkeitsmerkmalen oder Storyinhalten. Ebenfalls nicht berücksichtigt wurde Moxie, ein für Kinder gedachter sozialer Roboter mit animierten cartoonartigen Gesichtszügen und einem Kopf und einer Gestalt, die zwar eher an Figuren aus der Fiktion als an reale Vorbilder erinnern, aber dennoch als humanoid eingestuft werden können. Roboter wie Paro und Muflin oder Cupboo AI Robotic Pet (Boo Boo) werden häufig als zoomorph eingeschätzt und gehören eher nicht zur mythomorphen Kategorie im engeren Sinne, weil sie reale Arten – hier die Sattelrobbe und das Meerschweinchen – widerspiegeln.
4.1 Mirokaï
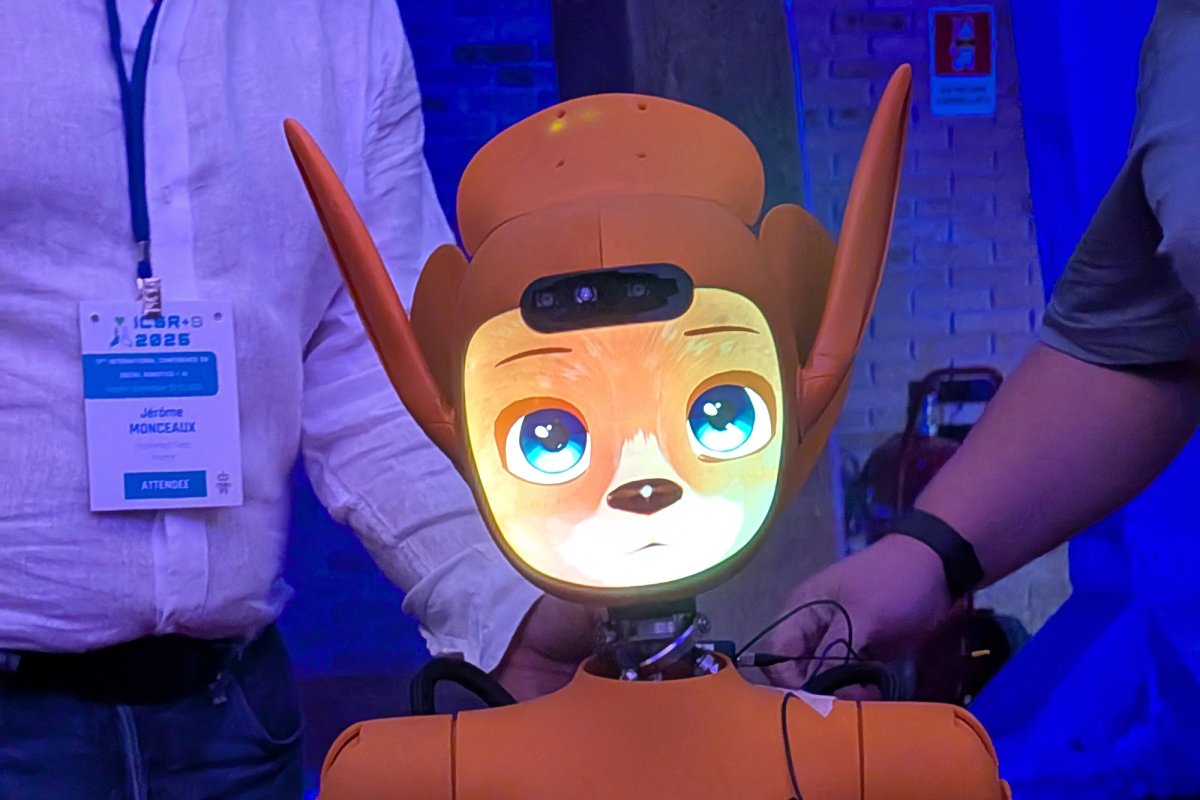
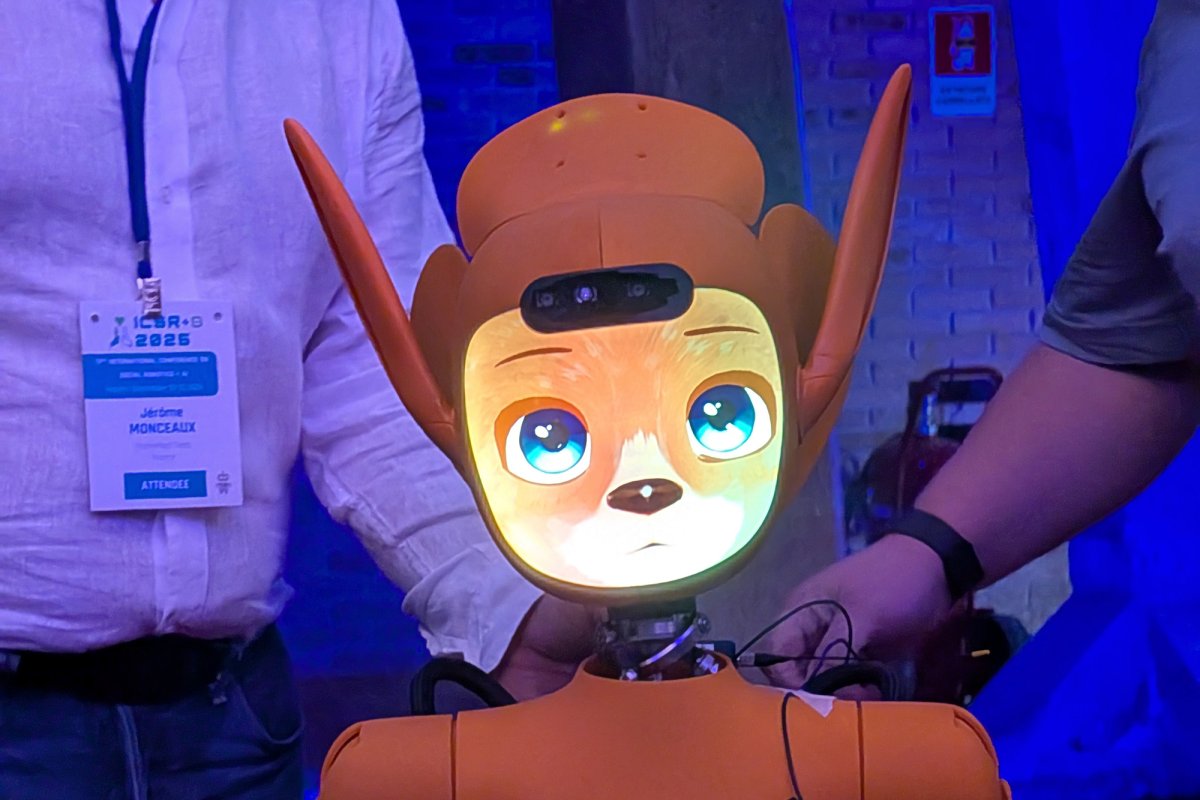
Die Mirokaï-Modelle sind soziale Roboter des französischen Unternehmens Enchanted Tools. Sie sind Produkte und werden seit etwa 2023 in ersten kommerziellen Anwendungen eingesetzt. Die Mirokaï sind für soziale Interaktion in öffentlichen und halböffentlichen Räumen wie Krankenhäusern, Pflegeeinrichtungen, Hotels oder Empfangsbereichen konzipiert. Der Zweck liegt in der Begrüßung, Begleitung, Information und emotionalen Ansprache von Benutzern. Der Roboter existiert in mehreren farblichen Varianten, mit zwei Geschlechtern (Miroka und Miroki) und unterscheidbaren Persönlichkeiten. Die Interaktion erfolgt in unmittelbarer Nähe zum Benutzer, meist in einem Abstand von ein bis zwei Metern, ohne direkten Körperkontakt. In der Gestaltung ist Miroka bzw. Miroki eindeutig mythomorph: Er bzw. sie weist ein fantasiehaftes, nicht reales Erscheinungsbild auf, das weder eindeutig humanoid noch zoomorph ist. Ein großes, animiertes Gesicht mit stark überzeichneten Ausdrucksformen und lange, spitze Ohren prägen den Gesamteindruck, ergänzt durch einfache Arm- und Kopfbewegungen (s. Abbildung 1). Eine komplexe Manipulation von Objekten ist teilweise möglich, etwa die Bedienung von Apparaten, die eigens für die Mirokaï entwickelt wurden, wie eine Seifenblasenmaschine. Die Kommunikation basiert auf gesprochener Sprache, visueller Mimik und bildschirmgestützten Animationen. Kognitive Fähigkeiten zeigen sich in KI-gestützter Navigation, Spracherkennung und einer begrenzten Anpassung an soziale Situationen. Mit Hilfe von Storytelling – u. a. auf der Website – wird die Herkunft der Mirokaï erklärt, die von einem fremden Planeten stammen.
4.2 Leonardo
Leonardo, häufig auch Leo genannt, ist ein für die Forschung gedachter sozialer Roboter des MIT Media Lab in den USA. Er wurde ab etwa 2004 in Zusammenarbeit mit Stan Winston Studio als Prototyp entwickelt und dient ausschließlich Forschungszwecken. Ziel ist die Untersuchung sozialer Interaktion, emotionaler Kommunikation und von Lernprozessen zwischen Mensch und Roboter. Leonardo ist nie zum Produkt geworden und besitzt keine Modellvarianten oder geschlechtliche Differenzierung. Die Interaktion findet in direkter Nähe zum Benutzer statt, häufig auf Tischhöhe und klar auf Face-to-Face-Situationen ausgelegt. Gestalterisch handelt es sich um ein bewusst mythomorphes Fantasiewesen mit großen Augen, Fell, Ohren und einem stark expressiven Gesicht. Die Figur ist nicht realistisch und keinem existierenden Lebewesen eindeutig zuordenbar. Beweglich sind Oberkörper, Kopf und Arme, die primär der gestischen und emotionalen Ausdrucksfähigkeit dienen, nicht der funktionalen Manipulation. Die Kommunikation erfolgt über Blickkontakt, Mimik, Gestik und einfache Lautäußerungen, während Sprache eine untergeordnete Rolle spielt. Die kognitive Dimension ist zentraler Bestandteil des Systems und umfasst Lernmechanismen, Emotionsmodelle und adaptive soziale Reaktionen.

4.3 Furby
Furby ist ein sozialer Roboter, der von Tiger Electronics erfunden wurde und durch das US-amerikanische Unternehmen Hasbro vertrieben wird. Er ist als Spielzeug gedacht, kam erstmals 1998 auf den Markt und ist bis heute in zahlreichen Generationen erschienen. Er ist ein auch aktuell käufliches Produkt und richtet sich primär an den privaten Gebrauch im Haushalt. Der Zweck von Furby liegt in Unterhaltung, sozialem Spiel und der Simulation von Beziehung und Bindung. Es existieren zahlreiche Varianten in Farbe, Design und Verhaltensprofil, jedoch ohne feste geschlechtliche Zuordnung (wobei man die Haare eher nach weiblichen oder männlichen Stereotypen gestalten kann). Sein Aussehen polarisiert – die einen finden ihn hässlich, die anderen niedlich. Furby wird in direktem Körperkontakt genutzt, etwa auf dem Schoß, in der Hand oder auf dem Tisch. In seiner Gestaltung ist er klar mythomorph: Er stellt kein reales Tier dar, sondern ein fiktives Wesen mit eigener Identität und Kunstsprache (s. Abbildung 2). Die Bewegungsmöglichkeiten beschränken sich auf Kopf, Augen, Ohren und Mund, ergänzt durch Reaktionen auf Berührung, Geräusche und Lageveränderungen. Die Kommunikation erfolgt nach 1998 über die Kunstsprache Furbish, in späteren Versionen ergänzt durch einfache Formen menschlicher Sprache sowie über emotionale Laute. Kognitiv zeigt Furby einfache adaptive Verhaltensänderungen, die auf Interaktionshäufigkeit und Nutzungsmuster reagieren.

4.4 Cozmo
Cozmo ist ein sozialer Roboter des inzwischen nicht mehr aktiven US-amerikanischen Unternehmens Anki. Er wurde 2016 als Produkt eingeführt, die Produktion wird von Digital Dreams Lab fortgeführt (inzwischen wieder unter dem Namen Anki, siehe hier). Cozmo dient der spielerischen sozialen Interaktion, der Unterhaltung und dem niederschwelligen Erlernen sozialer und technischer Konzepte. Mit Vector existiert eine farbliche und funktionale Variante mit Spracherkennung. Die Interaktion findet meist in Armeslänge statt, gelegentlich in sehr unmittelbarer Nähe auf dem Tisch oder dem Boden (s. Abbildung 3). Gestalterisch ist Cozmo stark stilisiert und filmisch geprägt und erinnert an animierte Science-Fiction-Figuren wie WALL·E (Körper) und Eve (Augen) aus dem Film „WALL·E“ (2008). Damit bewegt er sich klar im Bereich mythomorpher Gestaltung. Cozmo fährt gesteuert oder autonom auf Raupen umher, kann kleine, beleuchtete Würfel anheben und stapeln und nutzt Kopf- und Hebebewegungen zur emotionalen Ausdruckssteuerung. Die Kommunikation erfolgt über animierte Augen – entworfen von einem Pixar-Mitarbeiter – auf einem Display sowie über Töne, selten (nach Eingabe über die App) über natürliche Sprache. Er kann Namen lernen und beim Erkennen der Person wiedergeben. Kognitive Fähigkeiten umfassen entsprechend Objekt- und Gesichtserkennung, zudem einfache Entscheidungslogik und begrenzte Lernmechanismen. Cozmo gehört zu den meistverkauften sozialen Robotern [7].
4.5 Vergleich mit Hilfe des Fünf-Dimensionen-Modells
Über alle Beispiele hinweg wird deutlich, dass interaktionales Verhalten und Kommunikationsmuster eine zentrale Rolle dafür spielen, wie mythomorphes Design wahrgenommen wird – oft stärker als das statische Erscheinungsbild allein. Im Folgenden werden die Mirokaï-Modelle, Leonardo, Furby und Cozmo vergleichend entlang der fünf Dimensionen des genannten Modells (Interaktion, Kommunikation, Abbildung, Nähe, Nutzen) sowie der ergänzten sechsten Dimension der Kognition betrachtet. Der Vergleich erfolgt systematisch und zusammenhängend, nicht modellweise isoliert.
In der ersten Dimension, der Interaktion, zeigen sich funktionale Unterschiede. Die Mirokaï bewegen sich autonom im Raum, nutzen einfache Arm- und Kopfbewegungen und sind zur Objektmanipulation fähig. Leonardo ist auf expressive Bewegungen von Kopf, Armen und Oberkörper beschränkt, wobei diese primär der emotionalen Interaktion, nicht praktischen Handlungen dienen. Cozmo besitzt mit Miroka und Miroki die ausgeprägtesten Manipulationsfähigkeiten, wenn auch in kleinem Maßstab: Er kann Würfel erkennen, anheben und stapeln und verbindet diese Aktionen mit emotionaler Ausdrucksbewegung. Furby verfügt über keine echte Manipulation, sondern reagiert durch Bewegungen einzelner Körperteile auf Berührung, Lage und Geräusche. Interaktion ist hier primär reaktiv und körpernah.
Die zweite Dimension, die Kommunikation, ist bei allen vier Robotern zentral, jedoch unterschiedlich umgesetzt. Die Mirokaï-Modelle haben natürlichsprachliche Fähigkeiten, visuelle Gesichtsausdrücke und bildschirmbasierte Animationen und sind damit stark auf multimodale Kommunikation ausgelegt. Leonardo kommuniziert überwiegend nonverbal über Blickkontakt, Mimik, Gestik und Lautäußerungen. Furby verwendet eine Kunstsprache mit emotionalen Lauten, in späteren Modellen ergänzt durch einfache menschliche Wörter, wodurch eine eigene kommunikative Welt entsteht. Cozmo verzichtet weitgehend auf Sprache (außer es werden Sprachsequenzen dazukodiert oder bei der Gesichtserkennung aufgerufen) und nutzt stattdessen animierte Augen und Töne, die – zusammen mit den Arm- und Kopfbewegungen – stark emotional konnotiert sind (sein „Bruder“ Vector hat Spracherkennung und -ausgabe). Insgesamt zeigt sich, dass mythomorphe Gestaltung häufig mit nicht sprachlicher oder nur eingeschränkt sprachlicher Kommunikation einhergeht.
In der dritten Dimension, der Abbildung, zeigen alle vier Roboter eine klare Abkehr von real existierenden Menschen oder Tieren und sind damit mythomorph, allerdings in unterschiedlicher Ausprägung. Die Mirokaï und Leonardo sind am deutlichsten als Fantasiewesen entworfen, deren Körperbau, Proportionen und Gesichtszüge keiner realen Spezies entsprechen. Während Mirokaï in der weiblichen oder männlichen Ausführung eher an Figuren aus zeitgenössischer Animations- und Fantasykultur erinnert, ist Leonardo als bewusst fremdartiges, zugleich emotional lesbares Wesen gestaltet. Furby besitzt ebenfalls eine eigenständige, fiktionale Identität mit eigener Spezieslogik, die wie bei den Mirokaï kulturell als außerirdisch oder märchenhaft zu deuten ist. Cozmo ist am stärksten technisch abstrahiert, und sein Design erinnert an fiktionale Roboter aus Animationsfilmen wie WALL·E und Eve und verzichtet fast vollständig auf biologische irdische Anleihen, wenn man vom Simulieren von Emotionen absieht [7]. Insgesamt reicht das Spektrum von organisch-fantastisch (Leonardo, Furby) bis zu technisch-stilisiert (Cozmo).
In der vierten Dimension, der Nähe, unterscheiden sich die Modelle deutlich. Furby ist auf unmittelbaren Körperkontakt ausgelegt und wird gehalten, gestreichelt und bewegt. Leonardo operiert ebenfalls in sehr enger Nähe, meist auf Tischhöhe, jedoch ohne Körperkontakt und klar auf dialogische Situationen fokussiert. Cozmo interagiert auf kurzer Distanz, typischerweise auf dem Tisch oder dem Boden, mit gelegentlichen Annäherungen (wie bei Spielen), in gesteuerter oder autonomer Form. Die Mirokaï-Modelle halten im Vergleich den größten Abstand ein. Sie sind für Interaktionen im Raum konzipiert und bleiben im autonomen Modus in der Regel ein bis zwei Meter vom Benutzer entfernt. Damit nehmen sie eine Zwischenstellung zwischen persönlicher und öffentlicher Nähe ein, was auch gerne für Shows wie während der ICSR 2025 in Neapel genutzt wird.
Die fünfte Dimension, der Nutzen, drückt sich in den einzelnen Prototypen oder Produkten unterschiedlich aus. Die Mirokaï-Modelle verfolgen einen klaren funktionalen Zweck in Service, Begleitung und sozialer Unterstützung in pflegerischen oder öffentlichen Kontexten. Leonardo dient ausschließlich der Forschung und Erkenntnisgewinnung über soziale Kognition und Interaktion. Furby ist auf Unterhaltung, Spiel und emotionale Bindung im privaten Raum ausgelegt. Cozmo verbindet Unterhaltung mit Lern- und Experimentierfunktionen und richtet sich an ein spielerisch programmierendes junges Publikum. Trotz dieser Unterschiede erfüllen alle vier Roboter soziale Funktionen, indem sie Beziehung, Aufmerksamkeit und Interaktion erzeugen.
Die hier eingeführte sechste Dimension, die Kognition, ist bei allen untersuchten Robotern vorhanden, jedoch in sehr unterschiedlicher Tiefe. Leonardo besitzt komplexe kognitive Modelle, da Lernen, Emotion und soziale Anpassung explizit Forschungsgegenstand sind. Mirokaï nutzt KI-basierte Verfahren zur Spracherkennung und -ausgabe (nämlich ein LLM), zur Navigation und zur situationsabhängigen Reaktion, bleibt jedoch auf anwendungsnahe Kognition beschränkt. Cozmo verfügt über Objekterkennung, Gesichtserkennung und einfache Entscheidungslogik mit begrenzter Lernfähigkeit. Furby zeigt lediglich einfache adaptive Verhaltensänderungen, die eher simuliert als kognitiv fundiert sind. Die kognitive Dimension ist somit bei mythomorphen Robotern keineswegs einheitlich ausgeprägt, sondern reicht von rudimentärer Anpassung bis hin zu komplexen Forschungsmodellen.
Der Vergleich legt nahe, dass mythomorphe Gestaltung keine homogene Kategorie definiert, sondern über mehrere Dimensionen hinweg wirkt, insbesondere Repräsentation und Kommunikation. Dies stützt die Interpretation von mythomorphem Design als eine querliegende Dimension und nicht als klar abgegrenzte Klasse. Daraus ergibt sich, dass Unterschiede im Interaktionserleben vermutlich weniger durch das Erscheinungsbild allein als vielmehr durch die Kombination aus Gestaltung und Verhalten bestimmt werden, was in zukünftigen HRI-Studien näher untersucht werden sollte.
5. Ontologische, ästhetische und ethische Diskussion
Die mythomorphe Gestaltung sozialer Roboter wirft grundlegende ontologische, ästhetische und ethische Fragen auf. Diese lassen sich nicht isoliert beantworten, sondern stehen in enger Wechselwirkung mit der Interaktion und Kommunikation des Roboters, seiner Gestalt, seiner Nähe zu Menschen sowie seinem Zweck und Einsatzkontext. Damit sind auch die fünf Dimensionen des Modells genannt. In diesem Abschnitt werden die drei philosophischen Perspektiven zunächst getrennt entfaltet, auch unter Berücksichtigung der Dimensionen (mitsamt der vorgeschlagenen sechsten). Dann werden sie zusammengeführt, um die Forschungsfrage zu beantworten.
5.1 Ontologische Perspektive
Aus ontologischer Perspektive betrifft die mythomorphe Gestaltung zunächst die Frage nach dem Sein und dem Status sozialer Roboter. Humanoide und zoomorphe Roboter orientieren sich explizit an real existierenden Lebewesen und laden dadurch zu ontologischen Zuschreibungen ein, die über ihren tatsächlichen technischen Status hinausgehen. Sie erscheinen als defizitäre Menschen oder Tiere, als Nachahmungen des irdischen Lebendigen, was Fragen nach Bewusstsein, Empfindungsfähigkeit oder gar Rechten nahelegt. Mythomorph gestaltete Roboter setzen dem eine andere Strategie entgegen. Sie verzichten bewusst auf die direkte Kopie realer Menschen oder Tiere und positionieren sich stattdessen als fiktionale Wesen. Dies erzeugt eine scheinbare kategoriale Unterscheidung: Der mythomorphe Roboter ist weder Mensch noch Tier, sondern eine Maschine mit einer erfundenen Form, für die es allenfalls ein Gegenstück in der Vorstellung oder in außerirdischen Welten gibt.
Diese Interpretation ist jedoch nicht unproblematisch. Gegen die Auffassung, mythomorphes Design als eigenständige Kategorie zu behandeln, lassen sich mehrere Einwände vorbringen. Erstens sind viele fiktionale Figuren, die als Inspiration für solche Gestaltungen dienen – etwa Vulkanier oder Klingonen in „Star Trek“ – durchaus als humanoid einzuordnen. Gleichwohl führen selbst in diesen Fällen spezifische Merkmale (z.B. Ohren oder Schädelstrukturen) ein Maß an Andersartigkeit ein, das über bloße Menschenähnlichkeit hinausgeht. Dies legt nahe, dass mythomorphe Elemente auch innerhalb grundsätzlich humanoider Formen vorhanden sein können. Zweitens wird der Begriff „humanoid“ mitunter in einem weiten Sinn verwendet, der nicht nur Menschen, sondern auch künstliche Wesen und Außerirdische einschließt. Dies mag pragmatisch sinnvoll sein, birgt jedoch die Gefahr, bedeutsame Unterschiede in Gestaltung und Wahrnehmung zu verwischen. Die Konzeption von mythomorphem Design als eigenständige Dimension ermöglicht es, diese Unterschiede präziser zu fassen. Drittens sind Attraktivität und affektive Reaktionen häufig an biologische Vertrautheit gebunden. Entfernen sich Gestaltungen stärker von menschlicher Ähnlichkeit, können sie etablierte Muster der Wahrnehmung und Interaktion infrage stellen. In diesem Sinne lässt sich mythomorphes Design auch als ein Ansatz verstehen, die Grenzen zwischen Vertrautheit und Fremdheit in der Mensch-Roboter-Interaktion auszuloten. Insgesamt stützen diese Überlegungen die Auffassung, dass mythomorphes Design angemessener als eine Dimension denn als streng abgegrenzte Kategorie verstanden werden sollte.
Die ontologische Abgrenzung stellt eine wesentliche Chance dar. Sie kann dazu beitragen, falsche Erwartungen der Benutzer zu dämpfen und eine Verwechslung von Maschine und Lebewesen zu vermeiden. Der Roboter erscheint nicht als unvollkommene Kopie, sondern als eigenständiges Artefakt mit eigener Formensprache und Ausdrucksweise. Gleichzeitig birgt diese Strategie auch Risiken. Mythomorphe Figuren können trotz ihrer Fiktionalität starke emotionale Reaktionen hervorrufen und neue Projektionen auslösen. Die Anthropomorphisierung können sie nicht beseitigen, zumal meist deutliche irdische Merkmale vorhanden sind [23]. Storytelling, persönliche Eigenschaften und expressive Kommunikation können dazu führen, dass ihnen ein quasisubjektiver Status zugeschrieben wird. Ontologische Eindeutigkeit ist daher kein Automatismus, sondern hängt wesentlich davon ab, wie Abbildung, Kommunikation und Kognition im Sinne des erweiterten Fünf-Dimensionen-Modells ausgestaltet sind. In der Praxis werden diese ontologischen Zuschreibungen nicht allein durch das Erscheinungsbild bestimmt, sondern entstehen in der Interaktion, in der Verhaltenssignale, Reaktionsfähigkeit und Kommunikation eine entscheidende Rolle spielen.
5.2 Ästhetische Perspektive
Die ästhetische Perspektive richtet den Blick auf die Gestaltung selbst, auf Wahrnehmung, Attraktivität bzw. Schönheit und Ausdruck. Mythomorphe Gestaltung eröffnet einen erheblichen gestalterischen Spielraum. Entwickler sind nicht an biologische Plausibilität oder anatomische Vorbilder der Erde gebunden, sondern können Formen, Proportionen und Bewegungen frei entwerfen, geleitet von der reinen Fantasie oder wissenschaftlichen Erkenntnissen in Bezug auf den Weltraum und entsprechenden Imaginationen. Dies ermöglicht eine bewusste Abkehr vom Realismus und damit auch eine Umgehung des sogenannten Uncanny Valley, das insbesondere bei humanoiden Robotern mit realistischem oder hyperrealistischem Anspruch problematisch ist [21]. Fremdheit, Stilisierung und Fantasie können ästhetisch produktiv sein, Neugier wecken und eine spielerische Offenheit im Umgang mit dem Roboter fördern.
Gleichzeitig ist diese ästhetische Freiheit ambivalent. Mythomorphe Roboter können als schön, niedlich, faszinierend oder originell wahrgenommen werden, aber ebenso als hässlich, abstoßend, befremdlich, kitschig oder unangemessen, wie im Falle von Furby. Ästhetische Urteile sind subjektiv, beanspruchen jedoch – wie die klassische Ästhetik gezeigt hat – eine gewisse Allgemeingültigkeit [30]. Hinzu kommt, dass stark stilisierte Designs modischen Strömungen unterliegen und schneller altern können als funktional zurückhaltende Gestaltungen. Auch besteht die Gefahr, dass ästhetische Merkmale, die aus Fantasiewelten oder fernen Welten genährt werden, funktionale oder kommunikative Anforderungen überlagern. Entscheidend ist daher das Zusammenspiel von Abbildung, Nähe und Interaktion: Fremdheit kann reizvoll sein, solange sie nicht in Distanz oder Ablehnung umschlägt. Empirische HRI-Studien legen nahe, dass ein solches Zusammenspiel stark durch Timing, Bewegung und Reaktionsfähigkeit beeinflusst wird, die das ästhetische Erleben über statische Gestaltungsmerkmale hinaus prägen.
5.3 Ethische Perspektive
Die ethische Perspektive fragt nach den moralischen Implikationen der mythomorphen Gestaltung sozialer Roboter. Ein zentrales ethisches Problem Sozialer Robotik – behandelt in Informationsethik und Roboterethik – liegt im Täuschungspotenzial: Solche Maschinen simulieren Empathie und Emotionen, und Menschen können solchen Maschinen Eigenschaften zuschreiben, die diese nicht besitzen können, neben Empathie und Emotionen [25] auch moralische Verantwortung und ethische Rechte [4]. Mythomorphe Gestaltung kann hier eine entlastende Funktion haben. Indem der Roboter erkennbar fiktional ist, wird der Eindruck eines empfindungsfähigen Wesens abgeschwächt. Verantwortung bleibt mehr oder weniger klar bei den Menschen, die den Roboter entwickeln, betreiben und einsetzen. Die Maschinenethik kann mit dem sozialen Roboter als „moral agent“ experimentieren, was die menschliche Moral befruchten mag.
Zugleich entstehen neue ethische Herausforderungen. Auch mythomorphe Roboter können gezielt emotionale Bindungen erzeugen, etwa im Spiel, in der Pflege oder in der Begleitung. Die Instrumentalisierung von Emotionen bleibt daher ein relevantes Risiko, unabhängig von der konkreten Gestalt. Auch eine Anthropomorphisierung lässt sich nicht vollständig auflösen, wie bereits in der ontologischen Perspektive festgestellt wurde. Zudem kann eine ästhetisch ansprechende Gestaltung wie bei den Mirokaï oder eine verniedlichende Gestaltung wie bei Leonardo und Furby kritische Fragen nach Datennutzung, Überwachung oder Abhängigkeit in den Hintergrund treten lassen. Informations- und Roboterethik sind hier gefragt für einen verantwortungsvollen Umgang mit Kommunikation, Nähe und Nutzen, wie sie im Fünf-Dimensionen-Modell beschrieben sind, geraten aber ohne rechtliche Unterstützung schnell an ihre Grenzen. Nicht zuletzt kann die Maschinenethik in ihren Experimenten mit dem „moral agent“ verunglücken und menschliche Moral relativieren oder banalisieren. Diese ethischen Fragen sind eng mit dem Interaktionsdesign verknüpft, da die Wahrnehmung von Empathie, Handlungsfähigkeit oder Intention primär durch dynamische Interaktion entsteht und nicht allein durch das Erscheinungsbild.
5.4 Zusammenführung der Überlegungen
Führt man die ontologischen, ästhetischen und ethischen Überlegungen zusammen, so zeigt sich, dass mythomorphe Gestaltung sozialer Roboter als eine Dimension innerhalb eines breiteren Gestaltungsraums interpretiert werden kann, die sich mit bestehenden Designansätzen überschneidet. Sie besitzt eine eigenständige Legitimität insofern, als es erkennbare Unterscheidungen schafft, gestalterische Innovation ermöglicht und ethische Risiken teilweise reduziert. Zugleich ist es jedoch nicht selbsttragend. Ihre Potenziale entfalten sich nur dann, wenn sie bewusst eingesetzt, reflektiert gestaltet und kontextsensibel umgesetzt wird. Mythomorphes Design ist daher weder bloßes Spiel noch ein einfacher Kompromiss, sondern eine strategische Gestaltungsoption, die im Feld der sozialen Robotik ihre Berechtigung und Bedeutung hat, sofern ihre ontologischen, ästhetischen und ethischen Implikationen ernst genommen werden. Die Forschungsfrage ist damit entsprechend beantwortet. Die Analyse legt nahe, dass mythomorphes Design angemessener als eine querliegende Dimension denn als streng abgegrenzte Kategorie verstanden werden sollte. Dies impliziert, dass mythomorphes Design bestehende Kategorien nicht ersetzt, sondern sich mit ihnen überschneidet.
6. Zusammenfassung und Ausblick
Dieser Artikel hat die Frage behandelt, ob mythomorphes Design bei sozialen Robotern als eine sinnvolle Gestaltungsperspektive innerhalb eines breiteren und differenzierteren Designraums verstanden werden kann. Auf der Grundlage von Beschreibungen ausgewählter Beispiele sowie ontologischer, ästhetischer und ethischer Analysen wurde gezeigt, dass mythomorphe soziale Roboter durch ihre bewusst fiktionale Form erkennbare Unterscheidungen schaffen, kreative Gestaltungsräume eröffnen und zugleich bestimmte Risiken – insbesondere falsche Erwartungen – mindern können, wenngleich Anthropomorphisierung nicht vollständig ausgeschlossen werden kann. Mythomorphes Design erweist sich damit als eine gerechtfertigte und sinnvolle Alternative, die nicht als defizitäre Abweichung, sondern als eigenständige Gestaltungsperspektive innerhalb eines breiteren und differenzierten Designraums verstanden werden sollte, sofern sie reflektiert angewendet wird.
Gleichzeitig weist der Artikel Einschränkungen auf. Die empirische Basis ist schmal, nicht nur aufgrund der getroffenen Auswahl, sondern auch, weil es insgesamt nur wenige Beispiele für mythomorphes Design gibt. Der Beitrag nimmt vorwiegend philosophische Perspektiven ein und verzichtet weitgehend auf eine systematische gestaltungstechnische Analyse – entsprechende Überlegungen finden sich etwa bei Dunne und Raby oder Forlano [18, 19] – sowie auf informatikorientierte Analysen, beispielsweise zu Softwarearchitekturen, KI-Modellen oder Implementierungsfragen. Gestaltungsaspekte wurden nur insoweit berücksichtigt, als sie in der ästhetischen Perspektive philosophisch reflektiert wurden. Ebenso konnten weder empirische Nutzerstudien noch Analysen zur technischen Umsetzbarkeit einbezogen werden, obwohl solche Studien zum mythomorphen Design ohnehin nur begrenzt vorliegen. Darüber hinaus bleibt der hier entwickelte konzeptionelle Rahmen explorativ und bedarf weiterer theoretischer Ausarbeitung sowie empirischer Validierung.
Für die Zukunft ist davon auszugehen, dass mythomorphes Design an Bedeutung gewinnen wird, insbesondere in Kontexten, in denen soziale Roboter Erwartungen gezielt steuern, emotionale Offenheit fördern und zugleich eine klare Distanz zu menschlichen und tierischen Vorbildern wahren sollen – im Übrigen auch zu Geschlechterstereotypen sowie zu Vorurteilen im Zusammenhang mit ethnischer Zugehörigkeit oder Altersgruppen. Diese Entwicklung wird durch Computerspiele, Metaversen, Avatare von Chatbots sowie neu entstehende Werke der Science-Fiction und Fantasy vorangetrieben. Mythomorphe Roboter könnten zu Trägern neuer narrativer Formen, Interaktionskonzepte und sozialer Rollen werden und so dazu beitragen, die Soziale Robotik über die bloße Nachahmung irdischer Lebewesen hinaus weiterzuentwickeln.
Referenzen
[1] Anderson, M., Anderson, S. L. (Hrsg.): Machine Ethics. Cambridge University Press, Cambridge (2011).
[2] Aristotle: The Nicomachean Ethics. Penguin Books, London (2020).
[3] Barnes, J.: The Presocratic Philosophers. Routledge, London (1982).
[4] Bendel, O.: Haben Roboter Rechte? Edison, 2/2018, S. 71.
[5] Bendel, O. (Hrsg.): Handbuch Maschinenethik. Springer VS, Wiesbaden (2019).
[6] Bendel, O.: Soziale Roboter. In: Gabler Wirtschaftslexikon. Springer Gabler, Wiesbaden (2020). Link
[7] Bendel, O. (Hrsg.): Soziale Roboter. Springer Gabler, Wiesbaden (2021).
[8] Bendel, O.: Love dolls and sex robots in unproven and unexplored fields of application. Paladyn – Journal of Behavioral Robotics 12, 1–12 (2021). Link
[9] Bendel, O.: Schönheit. In: Gabler Wirtschaftslexikon. Springer Gabler, Wiesbaden (2023). Link
[10] Bendel, O.: Robotische Vierbeiner. In: Gabler Wirtschaftslexikon. Springer Gabler, Wiesbaden (2024). Link
[11] Bendel, O.: Robotische Zweibeiner. In: Gabler Wirtschaftslexikon. Springer Gabler, Wiesbaden (2024). Link
[12] Bendel, O.: The Universal Robot of the 21st Century. In: Seibt, J. et al. (Hrsg.): Social Robots With AI, IOS Press, Amsterdam (2025), S. 399–410.
[13] Bendel, O.: Humanoide Roboter. In: Gabler Wirtschaftslexikon. Springer Gabler, Wiesbaden (2025). Link
[14] Boer, L., Bewley, H.: Reconfiguring the appearance and expression of social robots by acknowledging their otherness. In: Proceedings of DIS’18, ACM (2018), S. 667–677.
[15] Christaller, T. et al.: Robotik. Springer, Berlin (2013).
[16] Coeckelbergh, M.: Three responses to anthropomorphism in social robotics. International Journal of Social Robotics, 14(10), 2049–2061 (2022).
[17] Duffy, B. R.: Anthropomorphism and the social robot. Robotics and Autonomous Systems 42(3–4), 177–190 (2003).
[18] Dunne, A.; Raby, F.: Speculative Everything. MIT Press, Cambridge, MA (2013).
[19] Forlano, L.: Posthumanism and Design. She Ji 3(1), 16–29 (2017). Link
[20] Jacquette, D.: Ontology. Routledge, London (2014).
[21] Mori, M.: The Uncanny Valley. Energy 7, 33–35 (1970).
[22] Ovid: Metamorphoses. Penguin Classics, London (2004).
[23] Remmers, P.: Humanoide, animaloide und dingliche Roboter. In: Bendel, O. (Hrsg.): Soziale Roboter. Springer Gabler (2021), S. 213–230.
[24] Rogge, A.: I Was Made for Love. In: Bendel, O. (Hrsg.): Maschinenliebe. Springer Gabler (2020), S. 55–78.
[25] Schulze, H. et al.: Soziale Roboter, Empathie und Emotionen. Zenodo (2021). Link
[26] Vallée, R., Aubergé, V.: Recherches sur l’interaction Humain–Robot avec les robots Mirokaï. ScreenDay 2024.
[27] Vlastos, G.: Ethics and physics in Democritus. The Philosophical Review 54(6), 578–592 (1945).
[28] Wallach, W., Allen, C.: Moral Machines. Oxford University Press, Oxford (2009).
[29] Yoshida, T. et al.: From text to motion: grounding gpt-4 in a humanoid robot “alter3”. Frontiers in Robotics and AI 12 (2025).
[30] Zangwill, N.: “Aesthetic Judgment”. In: The Stanford Encyclopedia of Philosophy (Fall 2024). Link
[31] Zaro, J. J., Salaberri, S.: Storytelling. Heinemann, München (1995).







