Humanoide Robotik braucht Fingerspitzengefühl
Wie Antriebstechnik robotische Hände lebendig macht: komplexe Bewegungen koordinieren, unterschiedliche Greiftechniken anwenden und Kraft präzise dosieren. Mit Motoren im Kleinstformat, intelligenter Steuerung und der Fähigkeit zur Anpassung
Die Hand ist das vielleicht ausdrucksstärkste Werkzeug des Menschen. Ihre Geschicklichkeit, Feinmotorik und sensorische Rückmeldung machen sie zur Schnittstelle zwischen Körper und Umwelt. Diese faszinierende Funktionalität in einer künstlichen Hand zu reproduzieren, ist eine der größten Herausforderungen der Robotik – und gleichzeitig eine ihrer vielversprechendsten Aufgaben. Ob in der Service- und Assistenzrobotik, in industriellen Anwendungen oder der modernen Prothetik – robotische Hände sollen das leisten, was die menschliche Hand seit Jahrtausenden perfektioniert hat: komplexe Bewegungen koordinieren, unterschiedliche Greiftechniken anwenden, auf äußere Reize reagieren und Kraft präzise dosieren. Dabei geht es nicht nur um Form und Beweglichkeit, sondern auch um Motoren im Kleinstformat, intelligente Steuerung und die Fähigkeit zur Anpassung an wechselnde Umgebungsbedingungen.
Die menschliche Hand ist ein hochkomplexes und fein abgestimmtes Zusammenspiel aus 27 Knochen, über 30 Gelenken und Muskeln sowie zahlreichen Sehnen für höchste Flexibilität und Kontrolle. Für eine künstliche Hand bedeutet das, dass sie gleichermaßen robust und flexibel, leicht und stabil, sowie kompakt und leistungsfähig konstruiert sein muss. Es ist ein technischer Balanceakt, der hohe Anforderungen an Materialien, Konstruktion und insbesondere die Antriebstechnik stellt. Elektromotoren sorgen für kraftvolle Bewegungen, Sensorik liefert das notwendige Feedback, und intelligente Steuerungssysteme koordinieren die Abläufe in Echtzeit. Kurzum: Damit sich eine robotische Hand möglichst menschlich bewegt, braucht sie ein präzises, fein abgestimmtes Innenleben. Ziel ist es, eine Symbiose aus Technik und Biologie zu schaffen – sei es zur Wiederherstellung verlorener Fähigkeiten oder zur Erweiterung menschlicher Handlungsmöglichkeiten. Dabei ist der Übergang zwischen humanoider Robotik und moderner Prothetik fließend. Beide Disziplinen bedienen sich ähnlicher technischer Prinzipien, um Bewegungen zu ermöglichen, die dem menschlichen Vorbild möglichst nahekommen.
Kleinstmotorik für Feinstmotorik
Humanoide Roboter bilden den Übergang zwischen künstlicher Intelligenz und der realen, physischen Welt. Ihre Hände sind nicht nur Werkzeuge, sondern Ausdrucksmittel und Interaktionsschnittstellen. Die Qualität der Bewegungsabläufe – wie flüssig, kraftvoll oder präzise sie ausgeführt werden – hängt maßgeblich von der zugrunde liegenden Antriebstechnik ab. Miniaturisierung, Präzision, Dynamik und Energieeffizienz sind dabei nicht nur Schlagworte, sondern zentrale Erfolgsfaktoren. Nur wenn diese Elemente ideal zusammenspielen, gelingt es, Bewegungen so natürlich erscheinen zu lassen, dass der Unterschied zum menschlichen Original kaum mehr auffällt. Besonders die hohe Energieeffizienz spielt eine große Rolle, da Platz und Energiequellen begrenzt sind und der Antrieb dennoch zuverlässig funktionieren muss.
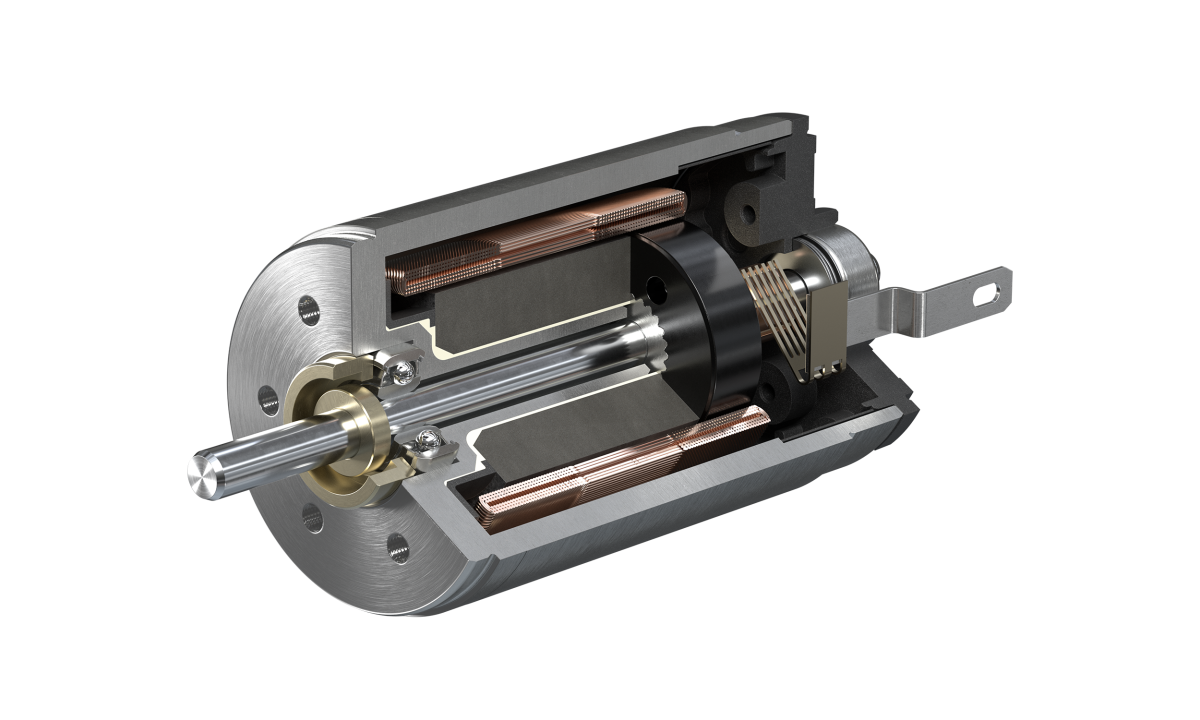
Um die Finger einer robotischen oder prothetischen Hand einzeln bewegen zu können, wird jeder Finger von einem oder mehreren Aktuatoren angetrieben. So kommen häufig mehr als 20 Antriebe pro Hand zum Einsatz, um komplexeste Bewegungsabläufe zu ermöglichen. Dass die Antriebe, zumeist bestehend aus Motor, Encoder, Planetengetriebe, Spindel und Steuerung, dabei extrem kompakt sein müssen, versteht sich von selbst. Nur so lassen sich die Finger individuell zu unterschiedlichen Griffmustern arrangieren – von filigranen Bewegungen bis hin zu kraftvollen Greifvorgängen. Besonders geeignet für diese anspruchsvolle Anwendung sind die DC-Motoren aus der Familie Faulhaber SXR. Durch ihre innovative Wicklungsgeometrie, den hochleistungsfähigen Selten-Erd-Magneten sowie die vielfältigen Kombinationsmöglichkeiten mit hochpräzisen Planetengetrieben bieten sie ideale Voraussetzungen für den Einsatz in künstlichen Händen.
Eine Hand voller Möglichkeiten
Faulhaber verfügt über jahrzehntelange Erfahrung in der Entwicklung und Produktion hochpräziser Antriebssysteme und kennt die besonderen Anforderungen, die Roboterhände und moderne Prothesen an die Technik stellen. Kleinstmotoren aus dem Hause Faulhaber kommen weltweit in medizinischen High-End-Prothesen ebenso zum Einsatz wie in robotischen Systemen. Sie ermöglichen das, was lange als visionär galt: kraftvolle, feinfühlige und dynamische Bewegungen auf engstem Raum. Denn ganz gleich, ob im menschlichen Körper oder in einem humanoiden Roboter – die Qualität jeder Bewegung beginnt mit dem richtigen Antrieb.