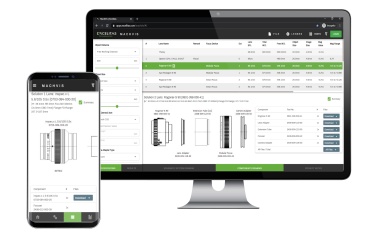
Objektivkonfigurator MachVis jetzt als Web-App
Excelitas Technologies stellt mit MachVis OnLine seine Software zur Konfiguration von Machine-Vision-Objektiven und -Systemen nun auch als kostenlose Web-App zur Verfügung.
Excelitas Technologies stellt mit MachVis OnLine seine Software zur Konfiguration von Machine-Vision-Objektiven und -Systemen nun auch als kostenlose Web-App zur Verfügung.

Cognex führt zwei neue Versionen der Visionpro- Bildverarbeitungs-Software Visionpro 10.0 und Visionpro Deep Learning 2.0 ein.

Die Forschungs- und Entwicklungskits Flir A50/A70 sind kostengünstige, gebrauchsfertige Lösungen für die Wärmebildanalyse bei Wirksamkeitsnachweis-Elektronikprüfungen und Forschungs- und Entwicklungsanwendungen. Durch die Bereitstellung von Tausenden von Temperaturmesspunkten können Anwender thermisches Rätselraten beenden, die Produktentwicklungszeit verkürzen und die Effizienz und Zuverlässigkeit der Produkte erhöhen.

SVS-Vistek präsentiert die SHR661 mit 127 Megapixel und Global Shutter. Sie basiert auf dem Sony Pregius-Sensor IMX661 mit einer Pixelgröße von 3,45 µm Kantenlänge.

Kithara zeigt auf der Vision 2021 "RealTime Vision“, eine PC-basierte Softwarelösung für Echtzeit-Erfassung und -verarbeitung von Bilddaten.

Die Heizplatte von AutoVimation sichert mit doppelter Leistung und halbiertem Volumen auch bei arktischen Temperaturen und starkem Wind den störungsfreien Kamerabetrieb. Durch ihre kompakte Bauform eignet sie sich für die Gehäuse der Baureihen Salamander, Gecko und Orca ab Größe S.

Um eine hohe Fahrsicherheit zu erreichen, müssen Head-Up-Display-Spiegel verzerrungsfreie Bilder übertragen. Um auch sehr kleine Formabweichungen auszuschließen, stellt ein Anbieter von Oberflächeninspektionssystemen eine Produktfamilie vor, die Spiegel mittels Deflektometrie automatisiert vermisst und prüft.

Das Automotive-Unternehmen Liuzhou AAM fertigt Antriebsachsen und -komponenten für konventionelle Fahrzeuge und Elektrofahrzeuge. Durch NC-Fügemodule mit laufender Kraft-Weg-Überwachung und Regelung des Fügevorgangs auf Basis genauer Sensordaten können die Ingenieure verschiedene Bauteile flexibel fertigen.

Das Automotive-Unternehmen Liuzhou AAM fertigt Antriebsachsen und -komponenten für konventionelle Fahrzeuge und Elektrofahrzeuge. Durch NC-Fügemodule mit laufender Kraft-Weg-Überwachung und Regelung des Fügevorgangs auf Basis genauer Sensordaten können die Ingenieure verschiedene Bauteile flexibel fertigen.

Die neuen Funktionen einer OP-Leuchte, wie eine einstellbare Farbtemperatur und ein variabler Lichtfelddurchmesser, brachten die Prüfingenieure in Teufels Küche: Sie waren mit herkömmlicher Messtechnik schlicht nicht zu verifizieren. Daher entwickelten sie gemeinsam mit einem Lichtmesstechnik-Spezialisten einen neuen Prüfstand inklusive teilautomatisiertem Messablauf.
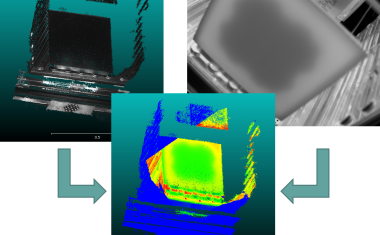
Während für konventionelle Bauteile meist ein Verfahren für die Qualitätssicherung ausreicht, kann es bei hybriden Materialien vorkommen, dass sich die Methoden nicht für alle im Bauteil vorkommenden Materialien eignen. Spätestens, wenn es um Metall- und Kunststoffverbunde geht, müssen mehrere Prüfverfahren kombiniert werden, um eine ganzheitliche Bauteilinspektion zu erreichen. Ein Beispiel ist das 3D-Thermografieverfahren für ein metallverstärktes CFK-Bauteil.

Das niederländische Unternehmen Van Raam mit Sitz in Varsseveld produziert Spezialfahrräder, mit denen bewegungseingeschränkte Menschen eine unabhängige Mobilität genießen können. Es fertigt seine Produkte nach den individuellen Bedürfnissen der zukünftigen Eigentümer. Viele Komponenten werden daher als Unikate mit unterschiedlichen Formen und Abmessungen hergestellt. Mit einem automatischen 3D-Scansystem können die Ingenieure die hohen Sicherheits- und Qualitätsstandards effizient erfüllen.

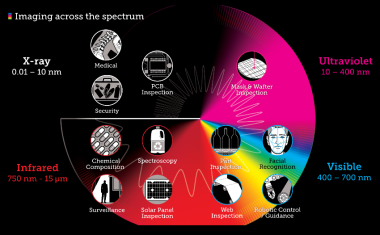
Das Infrarot-Spektrum und allgemein die hyperspektrale Bildverarbeitung sind voll im Trend. Die Gründe dafür liegen nicht so sehr in dem breiten Anwendungsspektrum, von Kunststoffrecycling bis zur Qualitätssicherung in der Chipfertigung. Die gestiegene Anwenderfreundlichkeit bei gleichzeitig sinkenden Kosten sind Hauptargumente für diesen Schub, ist sich Dr. Boris Lange von Edmund Optics sicher. Die inspect hat sich mit dem Optikspezialisten unterhalten.
Insbesondere in der Lebensmittelindustrie ist Effizienz entlang der gesamten Wertschöpfungskette ein essenzieller Wettbewerbsfaktor. Eine zuverlässige Automatisierung der Fertigungs- und Qualitätssicherungsprozesse ist hierbei entscheidend für eine moderne und leistungsfähige Fabrik. Künstliche Intelligenz macht Qualitätsinspektionen mittels Bildverarbeitung einfacher, schneller und effizienter. Ein Unternehmen aus Berlin zeigt wie.
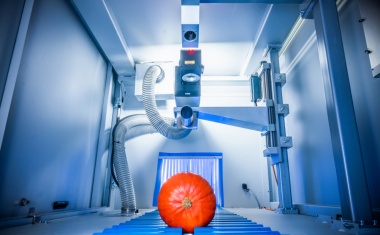
Statt den Barcode auf die Verpackung zu drucken, lässt er sich auch direkt auf die Schale von Obst oder Gemüse lasern. Das spart die Kosten für Verpackungen und schont die Umwelt. Doch damit die Schale dabei nicht beschädigt wird, muss der Fokus des Lasers trotz der stets unterschiedlichen Größen der einzelnen Früchte exakt sein. Dabei hilft ein 3D-Sensor eines norddeutschen Unternehmens.

Mit den Entwicklungen der Industrie 4.0 steigt auch die Digitalisierung der Produktion. Damit halten neue Konzepte wie die Simulation sowie stärker automatisierte Prozesse in den Unternehmen Einzug. Sie sollen dazu beitragen, den Produktionsprozess weiterzuentwickeln, Fehler aufzudecken und Mitarbeiter zu unterstützen. Ein solches System ist der Schlaue Klaus, der mittels digitalem Zwilling den Produktionsmitarbeiter aktiv unterstützt und Abläufe optimiert.

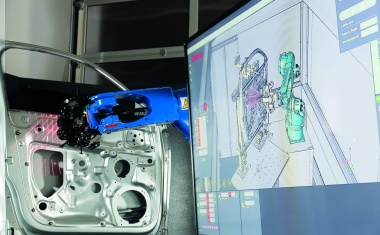
Eine vollautomatische, robotergestützte Inspektionsanlage prüft Cabriodächer. Neben dem Mikrometer-genauen 3D-Scan der Verdeckoberfläche testet das System mithilfe einer Infrarotkamera auch die Heckscheibenheizung. Für die 70 Messpositionen, die der Roboter abfährt, benötigt er nur zweieinhalb Minuten.
Künstliche Intelligenz – sowohl Training als auch die eigentliche Inferenz – konnte bisher hauptsächlich für Rechenzentren entwickelt werden. Dieser Trend verändert sich jedoch aktuell. Wenn die Inferenz direkt auf den bildgebenden Geräten selbst stattfinden soll, werden die Dinge interessant. Wie lässt sich eine derart leistungshungrige Technologie außerhalb von großen Rechenzentren in den kleinen ressourcenoptimierten Embedded-Geräten effizient und nachhaltig einsetzen? Es gibt bereits einige funktionierende Ansätze und Lösungen, um Neuronale Netze auf Edge-Geräten effizient zu beschleunigen. Aber nur wenige sind flexibel genug, um mit der schnell fortschreitenden KI-Entwicklung Schritt zu halten.

Mit dem GL-THT-Easy-System hat Glaub Automation & Engineering eine Roboterzelle für das Bestücken von Leiterplatten mittels Durchsteckmontage entwickelt. Kernkomponenten sind ein zweiarmiger kollaborativer Roboter und mehrere Kameras. Das Ergebnis ist eine Lösung für die Durchsteckmontage von beispielsweise Kondensatoren, die sich bislang im Unterschied zum SMD-Bestücken und Belöten kaum automatisieren ließ.

Großflächige Luftaufnahmen der Erdoberfläche sind eine besondere Herausforderung. Entscheidend für die Qualität der Aufnahmen sind die Kamerasysteme, die in Flugzeuge integriert werden, die in festgelegten Bahnen über die Erdoberfläche fliegen. In der Ultracam Osprey 4.1 sind acht CMOS Sensoren verbaut, deren gewonnene Daten über ein besonderes Schnittstellenkonzept zusammengefasst werden. Durch dieses Schnittstellenkonzeptes wurde der Datentransfer im Vergleich zu früheren Konzepten um das Zehnfache erhöht. Dies ist das Resultat aus der Zusammenarbeit des Kameraherstellers Ximea und Vexcel Imaging.

Zum ersten Mal gibt es detaillierte Filmaufnahmen einer Marslandung aus mehreren Blickwinkeln. Ermöglicht haben das unter anderem sechs Industriekameras eines US-amerikanischen Herstellers. Die faszinierenden Bilder zeigen, wie komplex das Manöver war und geben einen Eindruck, wie robust die Technik sein musste.
Dom-Beleuchtungen spielen ihre Stärken bei spiegelnden oder unebenen Bauteilen aus. Die Nachteile hingegen, darunter die Größe und Zerbrechlichkeit der Kuppel, verhindern häufig deren Einsatz. Ein Bildverarbeitungshersteller hat dieses Dilemma nun mit der sogenannten Flat-Dome-Beleuchtung gelöst.
Häufig glaubt der Mensch Dinge nur dann, wenn er sie sehen kann. Ein Qualitätssicherungs-Ingenieur kann einen Herstellungsfehler zum Beispiel oft erst verstehen, wenn er einen störenden Haarriss oder eine Materialverformung erkennt. Manchmal ist die Geschwindigkeit oder die Auflösung die wesentlichen Herausforderungen in einer Bildverarbeitungsanwendung. Manchmal ist es das Licht an sich.

Zahlreiche Messen – darunter die Control – mussten aufgrund der Pandemie auch 2021 wieder abgesagt werden. Doch Bettina Schall blickt nach vorn: auf die Control 2022, auf den digitalen Showroom Control-Virtuell und auf persönliche Begegnungen, die wir wieder schätzen lernen und nicht als selbstverständlich hinnehmen sollten.

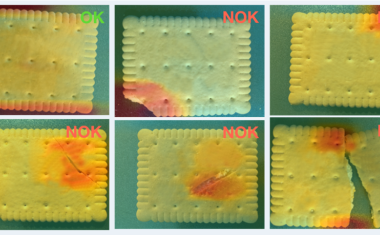
Der Wettbewerbsvorteil fehlerfreier Lebensmittel erfordert eine durchgängige Qualitätssicherung in der gesamten Wertschöpfungskette. Eine intelligente Beleuchtung mit Deep-Learning-unterstützter Bildverarbeitung stellt dies sicher und ermöglicht darüber hinaus flexible Produktionsprozesse. In der Fertigung eines namhaften Keksherstellers beweist das Inspektionssystem seine Leistungsfähigkeit.

Mit den AX Smart Cameras präsentiert Baumer seine ersten smarten Kameras in Industriequalität, die marktführende Nvidia Jetson Module mit leistungsstarken Sony CMOS-Sensoren zu einer kompakten, flexiblen und frei programmierbaren Bildverarbeitungsplattform für KI-Anwendungen vereinen. So kann auf einen separaten PC zur Bildverarbeitung verzichtet werden, was Platz und Kosten spart, sowie das Systemdesign und die Integration vereinfacht.
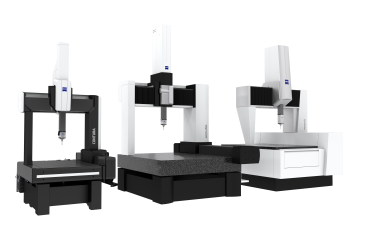
Sonderwünsche, Kleinserien und immer komplexere Bauteile bestimmen heute zunehmend den Produktionsalltag fertigender Unternehmen. Mit einer neuen Technologie, mit der sich unterschiedliche Sensoren auf einem Koordinatenmessgerät einsetzen lassen, steigt die Flexibilität der Qualitätssicherung. Letztlich ermöglicht das eine hohe Effizienz der Produktion und schafft so die Grundlage, damit fertigende Unternehmen auch Sonderwünsche wirtschaftlich umzusetzen können.
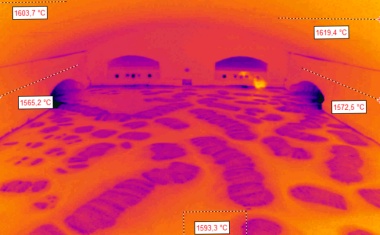
In der neuen Richtlinie VDI/VDE 5585 Blatt 2 werden erstmalig Kalibrierverfahren für Thermografiekameras beschrieben. Damit können aus bunten Bildern echte Messdaten werden.
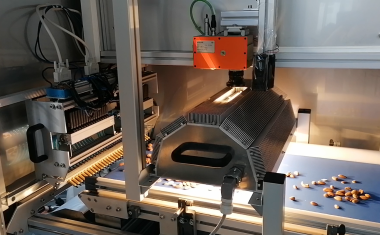
Eine Hyperspektralkamera kann in Sekundenschnelle eine braune Schale von einer braunen Nuss unterscheiden und ein Signal senden, dass der Fremdkörper ausgeschleust wird. Eingebunden in ein Lebensmittel-Inspektionssystem schließt das aus, dass der Verbraucher auf störende Schalenreste in Müsli, Keksen oder Schokolade stößt.

Wer ein Paket mit Nüssen oder Fruchtsnacks öffnet, erwartet einen qualitativ hochwertigen Inhalt – ohne Fremdkörper wie Nussschalen, Stein- oder Kunststoffteile. Deshalb kontrollieren Nahrungsmittelhersteller die Qualität ihrer Produkte mit Hyperspektral-Bildverarbeitungslösungen.
Da die präzise Vermessung großer Bauteile sehr aufwändig ist, wird sie meist nur stichprobenartig durchgeführt. Im Zuge ständig wachsender Qualitätsanforderungen steigt aber der Druck, die Messquote deutlich zu erhöhen – vor allem in der Automobilindustrie. Möglich macht dies eine automatisierte Messzelle des Ingolstädter Unternehmens MQS, die mit einem 6-achsigen Handlingroboter ausgestattet ist.

Ein finnischer Hersteller von Hyperspektralkameras erweiterte sein Portfolio um eine Plattform, die Kamera, Rechner und Software zu einer Komplettlösung kombiniert. Gedacht ist sie insbesondere für Sortieraufgaben, etwa in der Recycling-, der Kunststoff- oder der Lebensmittelindustrie.

Fehlerhafte Teile automatisch zu erkennen, ist das Ziel. Wie man jedoch einem Inspektionssystem die Merkmale von Gut- und Schlechtteilen beibringt, damit haben sich Mario Bohnacker, Technical Product Manager Halcon bei MVTec, und Bernd Sattler, Abteilungsleiter Bildverarbeitung bei Manz, beschäftigt. Heraus kam eine effiziente Qualitätssicherung für das modulare Lasersystem BLS 500 von Manz, mit dem Batterien hergestellt werden.

Zwei neue 65 Megapixel Kameras erweitern das Baumer Portfolio an hochauflösenden und robusten 10 GigE-Kameras der LX-Serie. Dank integriertem EF-Mount werden Canon EF-Objektive softwareseitig einfach via Baumer GAPI, Baumer neoAPI oder Third Party Software eingestellt, um Fokus und Blende dynamisch an Applikationen anpassen zu können. Auf externes Zubehör und dessen Verkabelung kann komplett verzichtet werden. Das vereinfacht die Integration, reduziert Kosten und steigert die Ausfallsicherheit.

Die SpectroNet Collaboration Conference (SCC) ist eine Konferenzserie, die sich schwerpunktmäßig mit Themen rundum Photonik und Machine Vision beschäftigt. Im Vordergrund der SCC steht der Austausch und die Vernetzung von Experten, Entwicklern und Ingenieuren aus der Industrie sowie Forschungseinrichtungen und Universitäten.




