
Mobiler Montageroboter für den Einsatz in gefährlichen Umgebungen
21.06.2018 -
-
 Schematische Darstellung von CompactRio mit angeschlossenen Sensoren, Aktoren und dem ROS
Schematische Darstellung von CompactRio mit angeschlossenen Sensoren, Aktoren und dem ROS -
 cRio-9035 als Hauptcontroller von Tiera
cRio-9035 als Hauptcontroller von Tiera -
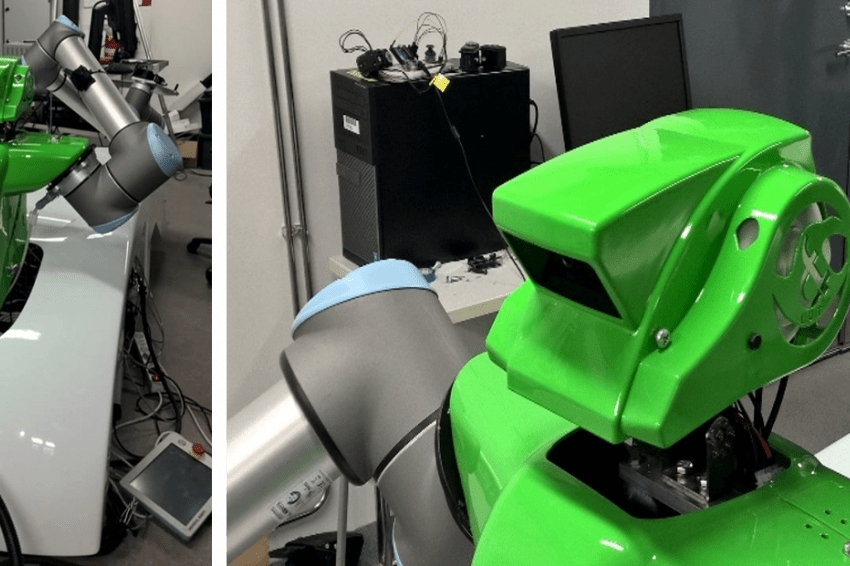 Fortschritte bei der Entwicklung des Tiera-Roboters
Fortschritte bei der Entwicklung des Tiera-Roboters
Ein mobiler Spezialroboter ist in der Lage, seine Umgebung zu erkennen, zu überwachen und durch diese zu navigieren, um in gesundheitsgefährdenden Umgebungen Reparaturen und Montagen durchzuführen.
Die Katastrophe im Kernkraftwerk Fukushima war für eine Projektgruppe der finnischen Lappeenranta University of Technology der Auslöser dafür, sich mit der Möglichkeit zu beschäftigen, dass Reparaturen in gefährlichen Umgebungen von modernen mechatronischen Systemen durchgeführt werden sollten, statt von Menschen. Es folgte die Entwicklung eines mobilen Roboters zur Durchführung von Montage- und Reparaturarbeiten.
Technische Lösungen für internationale Herausforderungen
2011 löste ein Erdbeben im Pazifik vor der Küste Japans einen gewaltigen Tsunami aus, der eine schwere Katastrophe im Kernkraftwerk Fukushima zur Folge hatte. Durch den Tsunami wurde sowohl die Strom- als auch die Notstromversorgung der Reaktorkühlsysteme unterbrochen, was bei drei Reaktoreinheiten zu einer Kernschmelze führte sowie zu einer Reihe chemischer Explosionen und der Freisetzung radioaktiven Materials.
Um eine weitere Katastrophe zu verhindern, blieben 50 freiwillige Mitarbeiter des Kraftwerks in der Sperrzone, um die Reaktoren zu stabilisieren. Diese mutigen Menschen, auch bekannt als die „Fukushima 50“, mussten einfache Reparaturarbeiten, unter anderem das Schließen von Ventilen, in einer der gefährlichsten Umgebungen der Welt durchführen. Die extreme Strahlenbelastung, der sie ausgesetzt waren, birgt ein hohes Potenzial für schwerwiegende gesundheitliche Langzeitfolgen.
Wie für viele Menschen auf der Welt waren die Fukushima 50 auch für die finnische Projektgruppe eine Inspiration. Ihr Einsatz ist ohne Zweifel bewundernswert, doch es musste eine Möglichkeit geben, diese Art von Reparaturarbeiten in gefährlichen Umgebungen von modernen mechatronischen Systemen durchführen zu lassen und nicht von Menschen. Das war der Auslöser für die Entwicklung des mobilen Montageroboters.
Tiera
Tiera ist ein vielseitig einsetzbarer, mobiler Roboter, der für die Durchführung von Reparatur- und Montagearbeiten in gefährlichen Umgebungen konzipiert wurde. Die Funktionalität und Beschaffenheit des Roboters sind genau auf die auszuführenden Aufgaben und die extremen Bedingungen der geplanten Arbeitsumgebungen abgestimmt. Beim Design wurden deshalb verschiedene Faktoren wie Strahlung, Korrosion, Toxizität, Explosionen, biologische Risiken, hohe Spannungen und extreme Temperaturen berücksichtigt.
Ein weiteres wichtiges Kriterium war eine hohe Beweglichkeit, damit der Roboter in der Lage ist, ein gefährliches Gebiet zu durchqueren. Dies unterscheidet den Roboter von den meisten Industrierobotern, die in der Regel stationär sind und über einen Gelenkarm verfügen, der auf einer festen Basis montiert ist. Die Projektgruppe erarbeitete zunächst das Konzept für die Fernsteuerung von einem sicheren Ort durch einen Experten und entwickelte daraufhin die Systeme für die Sensorik, Datenübertragung (WLAN und 4G), Virtual Reality und haptische Rückkopplung, die für eine intuitive Fernbedienung notwendig sind.
Weitere Bestandteile von Tiera sind:
- Ein lüfterloser Embedded-Computer für die Steuerung der Roboterhardware,
- Robotermanipulatoren und -werkzeuge zur Durchführung verschiedener Reparaturaufgaben,
- ein Bildverarbeitungssystem, über das der Bediener ein Videobild der Roboterkameras erhält,
- Sensoren zur Erfassung der Umgebungsinformationen.
Weiterentwicklung des anfänglichen Steuersystems
Zu Anfang des Projekts bestand das Steuersystem des Roboters aus einer Linux-basierten Distribution des Robot Operating System (ROS), das auf einem Industriecomputer ausgeführt wurde. Die Projektgruppe stellte jedoch bald fest, dass der Industrie-Controller für die Anforderungen des Projekts nicht ausreichte. Deshalb entschieden sie sich für CompactRio mit NI Linux Real-Time als Hauptsteuersystem, das mit dem ROS kommuniziert. Durch diese neue Architektur entstand ein sehr leistungsstarkes System mit hochpräzisen Steuerungsfunktionen und äußerst geringer Latenz.
Risiken senken, Leistung steigern
Die CompactRio-Plattform bietet integrierte Software, Hardware in verschiedenen Leistungsstufen und Formfaktoren sowie umfangreiche I/O, wodurch das Projektrisiko gesenkt, die Systemleistung gesteigert und die Entwicklung komplexer Embedded-Systeme vereinfacht wird. CompactRio-Controller umfassen zudem aktuelle Verarbeitungs- und heterogene Rechenelemente, sodass komplexe Steuer- und Regelalgorithmen mit deterministischen Antwortzeiten und der nötigen geringen Latenz ausgeführt werden können. Darüber hinaus profitiert das System mit den I/O-Modulen der C-Serie von messspezifischer Signalkonditionierung, integrierter Isolierung und leistungsstarken A/D-Wandlern, sodass sich Signale mit hoher Detailtreue erfassen lassen.
Durch den Einsatz des NI-Systems erübrigen sich separate Subsysteme, da die Controller direkt und ohne Umwege mit Sensoren, Anzeigen, Kameras, Motoren und Datenbanken verbunden werden können. Anschließend wurde mit der grafischen Entwicklungsumgebung LabView festgelegt, wie CompactRio die Daten verarbeiten soll. Mit LabView konnten wir auch ohne tiefergehende Kenntnisse in Hardwarebeschreibungssprachen die Embedded- und FPGA-Prozessoren des Systems programmieren. Darüber hinaus versetzten die in LabView integrierten Funktionen das System in die Lage, die Timing- und Speicheranforderungen intuitiv zu verwalten, und so konnten auch die Signalverarbeitungs-, Analyse-, Steuerungs- und mathematischen Routinen einfacher entwickelt werden.
Für die Datenübertragung zwischen den Komponenten kamen integrierte Treiber und APIs zum Einsatz, sodass sich die Projektgruppe voll und ganz auf die Entwicklung des Roboters konzentrieren konnte. Da so weniger Zeit für Datenerfassungsfragen aufgewendet werden musste, konnte mehr Zeit in die Datenanalyse und Entscheidungsfindung investiert werden, um die ordnungsgemäße Funktionsweise kritischer Komponenten sicherzustellen.
Nicht zuletzt konnte das finnische Universitäts-Team dank der erweiterbaren LabView-Architektur das System jederzeit – auch nach der Implementierung – einfach über die Software anpassen und neu konfigurieren.
Neuartige Lösung für die zentrale Robotersteuerung
Der wichtigste Bestandteil des zentralen Steuerungssystems von Tiera ist CompactRio mit NI Linux Real-Time in Kombination mit der Flexibilität und Funktionalität des ROS, wodurch zahlreiche neue Funktionen für den Roboter möglich wurden.
Die digitale Signalübertragung spielt bei jedem hochentwickelten Roboter eine entscheidende Rolle. Dazu gehört unter anderem die Kommunikation zwischen Bediener und Roboter, zwischen den Steuergeräten des Roboters und der Peripheriehardware sowie zwischen den verschiedenen vom Prozessor ausgeführten Programmknoten.
Die Steuernachrichten für die Bewegung der Roboterteile werden über ein lokales Netzwerk übertragen und von der Main Station als ROS-Topics veröffentlicht. Ein Onboard-Computer abonniert die Topics und liest die Nachrichten. Dann wird von dem im Roboter installierten Computer an jedes Gerät ein Signal entsprechend den Anweisungen geschickt. Die von einer Fernbedienung an die Main Station gesendeten Signale werden vom ROS verarbeitet und dann per WLAN an den Industriecomputer übertragen.
Die direkte Kinematik wurde im ROS auf der Main Station berechnet und die verallgemeinerten Koordinaten für die Steuerung an die Controller der mechanischen Komponenten übertragen. Wie bereits erwähnt, werden die Roboterteile über das ROS gesteuert, wobei einige Teile mithilfe von LabView-Software programmiert wurden. Dabei konnte das Universitäts-Team den Code für die verschiedenen Teile in einem zentralen Steuerprogramm zusammenführen, mit dem jedes Gerät des Roboters überwacht und gesteuert wird. Die Geräte-Controller sind alle über das lokale Netzwerk miteinander verbunden und können daher miteinander kommunizieren.
Mit Hilfe einer LabView-Bibliothek wurde der CompactRio-Controller in das Robotersystem integriert und Daten als ROS-Topics im lokalen Netzwerk veröffentlicht. Die Bibliothek wurde von der Tufts University entwickelt und ist kostenlos im LabView Tools Network erhältlich. Die LabView-Anwendung wird gleichzeitig auf dem CompactRio und der Main Station ausgeführt. Über die Benutzeroberfläche werden die Daten der Sensoren angezeigt, die nach der Veröffentlichung als Topics auch für die Steuerung anderer Teile des Roboters verwendet werden können. So werden beispielsweise die Räder angehalten, wenn die festgelegte Distanz zu einem Hindernis überschritten wird.
Durch das Zusammenspiel von LabView und ROS können wir verschiedene Arten von Geräten und Controllern in einem Netzwerk nutzen. Die Konsolidierung in einem Netzwerk ist nötig, damit die unterschiedlichen Hard- und Softwaregruppen zu einem gemeinsamen System zusammengeführt werden können.
Zukünftige Entwicklung
Die Entwicklung des Tiera-Roboters schreitet zügig voran. Alle Robotersysteme sind voll funktionsfähig und wurden bereits einzeln getestet. Der nächste Schritt sind Tests des gesamten Systems sowie weitere Upgrades.
Dank der Vielseitigkeit und Modularität von Tiera und dem NI-System lässt sich der Roboter nicht nur für Montage- und Reparaturarbeiten in gefährlichen Umgebungen einsetzen. Durch eine Umrüstung kann der Roboter schnell für unterschiedliche Anwendungsbereiche und Aktivitäten angepasst werden.
Kontakt
National Instruments Germany GmbH
Ganghoferstrasse 70 b
80339 München
Deutschland
+49 89 741 31 30
+49 89 714 60 35



