
KI-gesteuerter universeller Depalletier-Roboter
Bildverarbeitung und künstliche Intelligenz in der Logistik
-
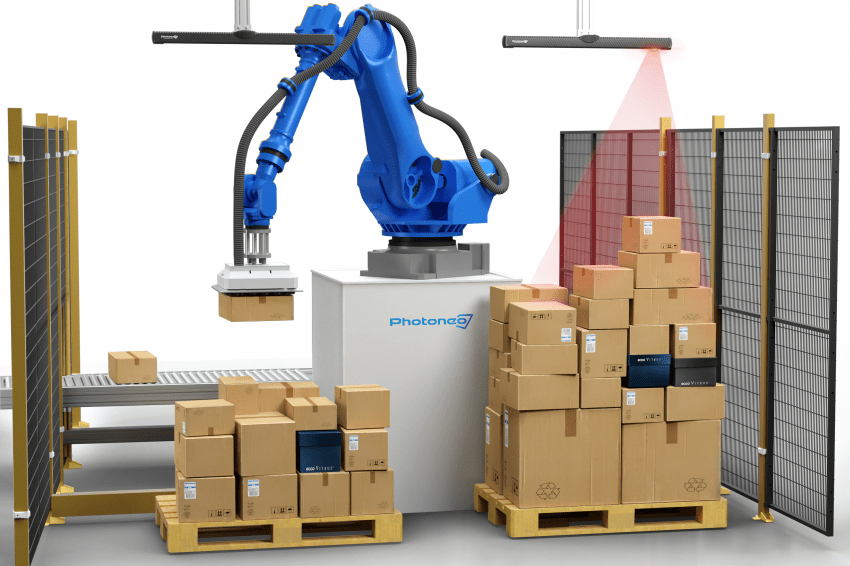 Trotz seiner geringen Größe kann der speziell konstruierte Greifer Objekte von bis zu 50 kg Gewicht handhaben. Bild: Photoneo
Trotz seiner geringen Größe kann der speziell konstruierte Greifer Objekte von bis zu 50 kg Gewicht handhaben. Bild: Photoneo
Die Kombination von 3D-Bildverarbeitung und künstlicher Intelligenz zu einem vision-gesteuerten Roboter ermöglicht es, Prozesse zu automatisieren, die zuvor manuell durchgeführt wurden. Auch der Logistiksektor profitiert stark von den Möglichkeiten, die diese Technologie bietet, da die Volumina steigen und damit die Notwendigkeit, logistische Prozesse effizienter zu gestalten.
Der Einsatz von vision-gesteuerten, intelligenten Robotern beim Entladen von mit Kisten beladenen Paletten ist ein neuer Ansatz in der Logistik, der sich auf eine Kombination von leistungsstarker 3D-Bildverarbeitung und fortschrittlichen KI-Algorithmen stützt. Im Gegensatz zur klassischen Depalettierung von Hand auf der einen Seite und der Delayerization auf der anderen, bei der der Roboter die gesamte Palette mit gleichförmig angeordneten, einheitlich großen Kartons aufnimmt, stellt die KI-gesteuerte Depalettierung die höchste Stufe der Roboterentladung dar und übertrifft die beiden anderen Alternativen.
Warum sich für die KI-gesteuerte Depalettierung entscheiden?
Eines der Unternehmen, das seine Anstrengungen in die Entwicklung der vision-gesteuerten, intelligenten Robotik investiert, ist Photoneo. Dessen Expertenteam hat eine KI-gesteuerte, universelle Depalettierungslösung entwickelt, die 1.000 Kartons pro Stunde kommissionieren kann. Das System erreicht eine Pick-Rate-Genauigkeit von 99,7 Prozent und eine Greifpräzision von ±3 mm.
Trotz seiner geringen Größe kann der speziell konstruierte Greifer Objekte von bis zu 50 kg handhaben. Dies ist besonders, weil die großen und schweren Kartons oft einige Meter über dem Boden gestapelt werden. Dies erhöht die drohende Verletzungsgefahr im Falle einer manuellen Bedienung, aber auch den Bedarf an Arbeitskräften, was wiederum die Kosten erhöht. Eine KI-gesteuerte Depalettierung erhöht daher die Lagerproduktivität und letztlich die Kapitalrendite (ROI).
Ein mit Bildverarbeitung und KI ausgestatteter Roboter
Die eingesetzte 3D-Bildverarbeitung muss einerseits eine hohe Auflösung und Genauigkeit sowie andererseits ein großes Scan-Volumen bieten. Dies ist entscheidend, da die Paletten oft in mehreren Schichten übereinandergestapelt sind. Der 3D-Scanner muss die unterste und die oberste Palette scannen können, und es muss genügend Platz für den Roboter zur Manipulation der Kisten bleiben. Mit anderen Worten, der Scanner muss etwa 3 bis 4 Meter über der Palette angebracht sein und trotzdem Scans von höchster Qualität liefern.
Photoneos Depalletierer setzt den firmeneigenen Phoxi-3D-Scanner ein. Das XL-Modell verfügt über einen Scanbereich von 1.680 bis 3.780 mm und liefert bei jedem Scan 3,2 Millionen 3D-Punkte. Daraus ergeben sich hochwertige 3D-Daten, die Algorithmen weiterverarbeiten.
Photoneos Algorithmen wurden für mehr als 5.000 Kistentypen getestet, wodurch das System jede einzelne Kiste sofort erkennen und lokalisieren kann. Wenn das System auf neue Kistentypen stößt, trainiert es sich schnell neu. Dies geschieht kontinuierlich und garantiert die Erkennung von Objekten unterschiedlicher Größe, Form und Materialien. Das System verarbeitet problemlos glänzende, reflektierende oder schwarze Oberflächen. Unterschiedliche Oberflächenbeschaffenheit sowie Bänder, die sich lösen oder Muster und Bilder, die normalerweise die 3D-Vision in die Irre führen können, stellen für die ausgeklügelten KI-Algorithmen keine große Herausforderung dar. Auch zufällig platzierte Kisten, oder schräg stehende sind kein Problem. Selbst bei dicht gepackten Paletten, bei denen es schwierig ist, die Lücke zwischen den Kisten zu erkennen, kommt das System zurecht. Dies ist auch der Tatsache zu verdanken, dass das System die fortschrittlichste Art der Segmentierung auf der Grundlage der 3D-Bild- und Texturanalyse verwendet – ein faltendes neuronales Netz.
Greifen der Kisten: der Ablauf
Nach erfolgreicher Erkennung entscheidet das System, welche Kiste zu entnehmen ist und wie sie zu greifen ist, um die Saugkraft des Greifers zu optimieren. Dann sendet es einen Befehl an den Roboter, um den Greifvorgang durchzuführen.
Der Depalletierer von Photoneo setzt primär einen Ein-Zonen-Universalgreifer ein, mit dem das System in der Regel eine Zykluszeit von unter 10 Sekunden erreicht. Dies hängt vom Robotertyp, der Oberfläche der Kartons sowie deren Inhalt und auch von der Umgebung ab. Wünscht ein Anwender eine kürzere Zykluszeit, kann er sich für einen Mehrzonen-Greifer entscheiden, der mehrere Kartons gleicher Höhe gleichzeitig aufnehmen und diese dann nacheinander ablegen kann.
Sofort einsatzbereite Leistung
Da der Depalletierer mit einem großen, vortrainierten Datensatz von Boxen geliefert wird und ständig neue Typen lernt, funktioniert er sofort nach der Installation ohne vorheriges Trainieren der neuronalen Netze. Dadurch wird die Bereitstellungs- und Integrationszeit erheblich verkürzt und macht den Depalletierer zu einer universellen Lösung.
Moderne, wettbewerbsfähige Lagerprozesse
Die Automatisierung logistischer Prozesse wird für jedes Unternehmen, das einen Wettbewerbsvorteil gewinnen und erhalten will, zu einer Notwendigkeit. Roboter, die über eine hochwertige Bildverarbeitung und künstliche Intelligenz verfügen, können die Arbeit schneller und zuverlässiger erledigen und im Gegensatz zu Menschen nonstop arbeiten. Diese gesteigerte Produktivität senkt die Kosten. Genauso wichtig ist es, dass der Einsatz von Robotern das Risiko von Gesundheitsschäden durch die Handhabung von schwerem Material eliminiert. Wir erleben eine Revolution in der Logistik, und die KI-gestützte Depalettierung ist bereit, Ihr Lager in die Moderne zu führen.



