
3D-Stereo-Vision
Innovationen in der Lebensmitteltechnologie mit Global-Shutter-3D-Kameras
-

-
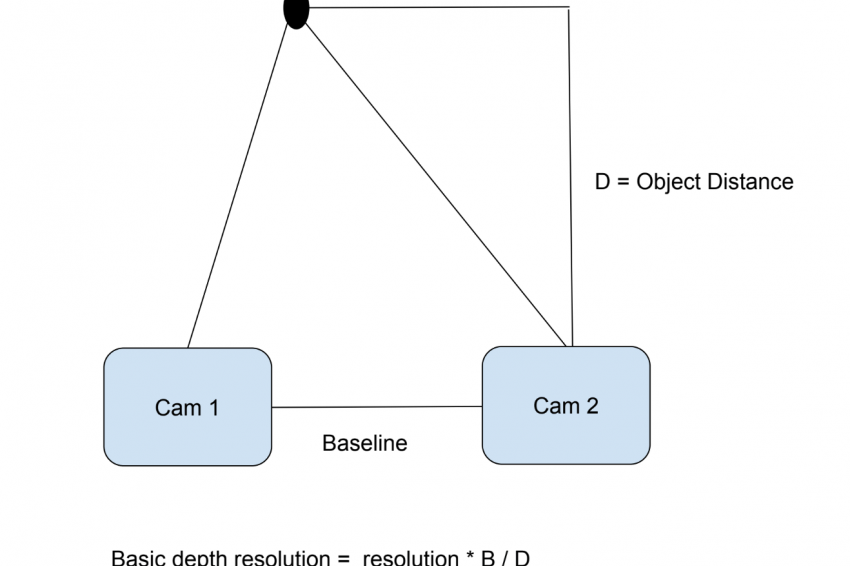 Abb. 1: Schematische Darstellung der Tiefenauflösung
Abb. 1: Schematische Darstellung der Tiefenauflösung -
 Abb. 2: Das Bilderfassungs- und Ausleitsystem ist mit dem Enkoder-Input vom Förderband synchronisiert.
Abb. 2: Das Bilderfassungs- und Ausleitsystem ist mit dem Enkoder-Input vom Förderband synchronisiert. -
 Abb. 3: Die Position des Käsestücks wird aus einem dichten 3D-Bild berechnet.
Abb. 3: Die Position des Käsestücks wird aus einem dichten 3D-Bild berechnet.
3D-Machine-Vision ist ein entscheidender Bestandteil der nächsten Generation innovativer FoodTech-Lösungen. Mit 3D-Kameras als Kernelement etikettieren entsprechende Systeme Käse und inspizieren Pizzas auf dem Förderband.
Eine Stereo-Vision-Kamera funktioniert ein bisschen wie die Augen eines Menschen. Wenn Sie ein Objekt von zwei Positionen aus betrachten, enthält die relative Verschiebung Tiefeninformationen. Die Tiefenauflösung kann durch die folgende Gleichung ausgedrückt werden:
Tiefenauflösung = Kameraauflösung * Grundlinie / Objektentfernung
Die Formel und Abbildung 1 zeigen Folgendes:
- Die Tiefenauflösung ist proportional zum Verhältnis zwischen Grundlinie und Arbeitsabstand.
- Die Tiefenauflösung ist proportional zur Kameraauflösung und zur Genauigkeit der 3D-Kamerakalibrierung.
Dies führt zu folgenden wichtigen Erkenntnissen:
- Eine 29-MPixel-Kamera ist zehnmal genauer als eine VGA-Kamera.
- Längere Arbeitsabstände können/sollten durch eine längere Baseline (deutsch: Grundlinie) kompensiert werden.
- Eine kleine Kamera sieht gut aus, kann jedoch längere Arbeitsabstände nicht bewältigen.
- Echte Subpixelauflösung und 3D-Kalibrierungsgenauigkeit sind die Grundvoraussetzungen für ein gutes 3D-Stereo-Vision-System.
- Die Tiefenauflösung ist proportional zur Systemauflösung.
Einschränkungen oder eine wichtige praktische Herausforderung bestehen darin, die entsprechenden Merkmale in den beiden Bildern zu finden und nicht zu verwechseln. Okklusion und Perspektive können eine Herausforderung sein, da einige Funktionen nur in einem der Bilder vorhanden sind.
Global-Shutter-3D-Kameras für sich bewegende Objekte
Thor Vollset, CEO und Gründer von Tordivel, erklärt: „Die Scorpion 3D Stinger Kamera mit Global Shutter ist für den Einsatz in modernen 3D-Stereo-Vision-Systemen konzipiert. Die Kamera besteht aus zwei Global-Shutter-Area-Scan-Kameras, mehreren Stroboskop-LEDs und einem leistungsstarken Random-Pattern-Projector-Laser, die alle auf der Wellenlänge 830 nm arbeiten – Infrarot. Die 3D-Kameras sind 3D-kalibriert, und das Scorpion Stinger-System erstellt aus zwei 2D-Bildern ein 3D-Bild mit dichten Bildinformationen unter Verwendung von Block Matching. Der Block Matcher berechnet für jedes Pixel in der 3D-Kamera einen 3D-Punkt.”
Anwendung: Automatisches 3D-Sortiersystem für Pizza
Das Pizzasortiersystem umfasst die folgenden Spezifikationen:
- Durchschnittsradius,
- minimaler und maximaler Radius,
- Ovalität,
- minimale und maximale Dicke.
Die Anforderungen an die Messauflösung für ein industrielles System nach aktuellem Stand der Technik betragen 0,1 mm in x, y und 0,5 mm in z. Die abgelehnten Pizzen werden vom exakt gesteuerten Ausleitsystem in Echtzeit in den Abfallbehälter aussortiert.
Weitere Backwarenanwendungen, die alle eine 3D-Inspektion und ein Ausleitsystem auf einem sich bewegenden Förderband erfordern, sind Brot, Tortillas und Kekse. Mehrere 3D-Kameras können quer über das Förderband montiert werden, um Breiten von 400 bis 3.200 mm abzudecken.
Das Pizzasortiersystem besteht aus den folgenden Hauptelementen (Abb. 2):
- Scorpion Embedded-PC – Windows 10 Pro,
- Solid-State-PC, der mit Intel i7 Quad Core läuft,
- Scorpion 3D Stinger-Kamera,
- zwei 2,3 MP CMOS-Sensoren,
- Laser für zufällige Musterprojektion und Stroboskop-LEDs,
- Ausgabe des Echtzeit-Ausleitsystems in einen Abfallbehälter.
Anwendung: Käseetikettierung per Roboter
Die Anwendung für die Etikettierung von Stilton-Käse ist neuartig, denn der Roboter wird dabei eingesetzt, um – im Gegensatz zum üblichen Pick-and-Place – das Objekt zu bewegen. Hierbei geht es darum, den Käse mehr oder weniger als Teil des natürlichen Flusses des Förderbands genau zu kennzeichnen. Dies ermöglicht wahrscheinlich die effizienteste Form der Automatisierung.
Das System besteht aus den folgenden Elementen:
- zwei Flexpicker-Roboter,
- ein flexibler Etikettierer, der am Arm jedes Roboters angebracht ist,
- ein präzises Echtzeit-3D-Bildverarbeitungssystem, das mit einem Enkoder vom Förderband synchronisiert ist,
- eine Scorpion 3D Stinger-Kamera,
- ein Embedded-PC, auf dem Windows 10 Pro läuft.
Die 3D-Kamera sorgt für die Positionierung des Käses
In weniger als 300 ms wird die Position eines Käses berechnet (Abb. 3). Das Vision-System speist zwei Etikettier-Roboter mit dem Mittelpunkt - x, y, z - rz - der Drehung um die Z-Achse und dem Käseschnittwinkel. Die Position wird aus dem in Abbildung 2 gezeigten 3D-Bild berechnet. Die 3D-Stinger-Kamera ist in einem Abstand von 1.200 mm montiert. Sie ist mit LEDs und RPP-Laser ausgestattet, die im Infrarotbereich arbeiten. Die Kamera wird einmal pro Sekunde ausgelöst, um mit dem Fluss des Käse-Förderbands Schritt zu halten. Die Infrarotbeleuchtung bietet einen hervorragenden Schutz vor Umgebungslicht. Der Hauptzweck des Systems ist das Aufbringen des Etiketts auf ein Stück Käse in Bewegung, dabei kann es 120 Stück Käse pro Minute und 7.200 Stück pro Stunde kennzeichnen. Um das Etikett während der Bewegung aufzubringen, ist ein flexibler und ausgereifter Greifer erforderlich, und 3D Vision sowie Roboter müssen mit der Bewegung des Förderbands synchronisiert sein. Der Enkoder-Input vom Förderband zur Kamera und der Roboter stellen dies sicher.
Zusammenfassung
Diese Anwendungen sind führend im Bereich der Foodtech-Applikationen. Die Global Shutter 3D-Kamera liefert in Echtzeit die benötigten 3D-Bilder des sich schnell bewegenden Käses oder der Pizza. Eine globale 3D-Shutter-Kamera mit 3D-Stereo-Vision bietet viele Vorteile:
- funktioniert ohne Geschwindigkeitsbegrenzung,
- präziser, da die Bewegung bei der Bildaufnahme eingefroren wird,
- wird durch die Bewegung des Förderbands oder durch andere Scan-Artefakte nicht beeinflusst,
- es ist ein sehr einfaches und kostengünstiges Konzept,
- ideal für OEM-Anwendungen.
Das Scorpion 3D Stinger-System für Roboter-Vision wurde entwickelt, um die klassische Herausforderung der Hersteller zu meistern: Das Kommissionieren von Teilen von einem Förderband, einer Palette oder einer Kiste oder die Palettierung von Kisten auf einer Palette. Das System erfasst Bilder, identifiziert und lokalisiert das Produkt und sendet die ID und den 3D-Standort an einen Kommissionier-Roboter. Die Familie kostengünstiger Bildverarbeitungskomponenten eignet sich für Anwendungen in der Automatisierung, wie optische und mechanische Systeme, Industriekameras und Softwareprodukte. Sie sind einfache, moderne und kostengünstige Bausteine für OEM und Systemintegratoren.


