
Die Herausforderung beim Testen von Sensorfusionstechnologien
Auf dem Weg zum autonomen Fahrzeug
Jede Sensortechnologie hat ihre Stärken, aber auch ihre Schwächen. Kombiniert man die verschiedenen Technologien, lässt sich deren Aussagekraft erhöhen. Diese sogenannte Sensorfusion gilt als Schlüsselrolle, die über den Erfolg der intelligenten Fahrzeuge entscheidet. Daher braucht es entsprechende Testsysteme, die in der Lage sind, verschiedene Sensorfusionstechnologien zu bewerten.
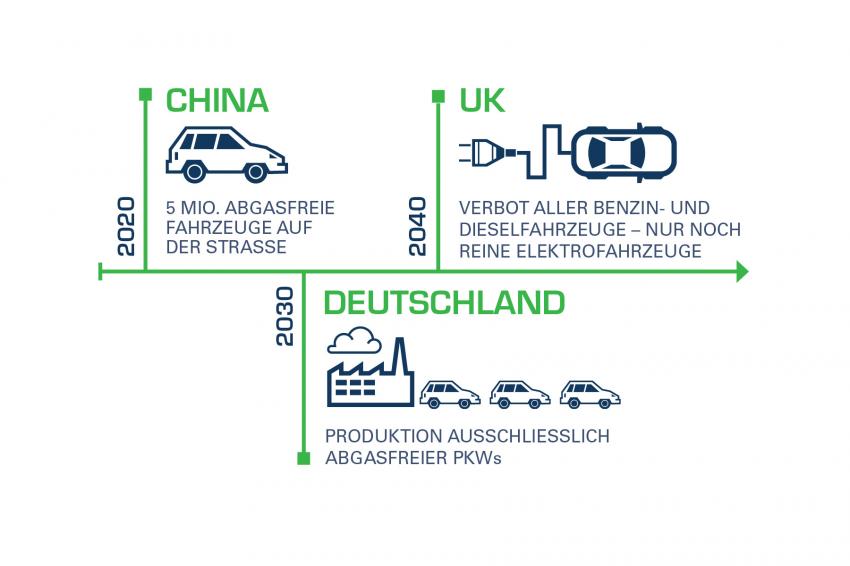
Autonome Fahrzeuge waren einst Stoff in Science-Fiction-Filmen. Jetzt werden sie in wenigen Jahren Realität sein. So gab beispielsweise Honda im Juni 2017 bekannt, an der Entwicklung eines eigenen autonomen Fahrzeugs zu arbeiten, das bis 2025 straßentauglich sein soll. Eine wichtige Technologie für das autonome Fahren ist die Sensorfusion. Dabei werden Daten von unterschiedlichen Sensortypen zusammengeführt, um die Entscheidungsfindung zu unterstützen. Die Sensorfusion nahm bei der Apollo-Mondlandefähre ihren Anfang und ist heute in jedem Smartphone zu finden, wenn beispielsweise Daten von GPS-Sensoren mit denen von Beschleunigungsmessern und Gyroskopen verknüpft werden.
Die Sensorfusion erlaubt es Herstellern, kostengünstigere, weniger leistungsstarke Sensoren zu verwenden und gleichzeitig die Batterielebensdauer zu verlängern, während Kunden von einer umfassenderen Funktionalität profitieren. Was dieses Konzept in Fahrzeugen zu einer Neuheit macht, ist die Zusammenführung aktiver, intelligenter Algorithmen mit neuen Sensorkombinationen. Auch wenn das volle Potenzial von Sensorfusionstechnologie bis jetzt noch nicht bekannt ist, stehen Testingenieure bei der praktischen Umsetzung dieses Konzepts für autonome Fahrzeuge heute vor zwei großen Herausforderungen: Das ist zum einen die schnelle Weiterentwicklung der Sensortechnologie, zum anderen die schwierige Synchronisierung der unterschiedlichen Sensorarten.
Herausforderung 1: Weiterentwicklung der Sensortechnologien
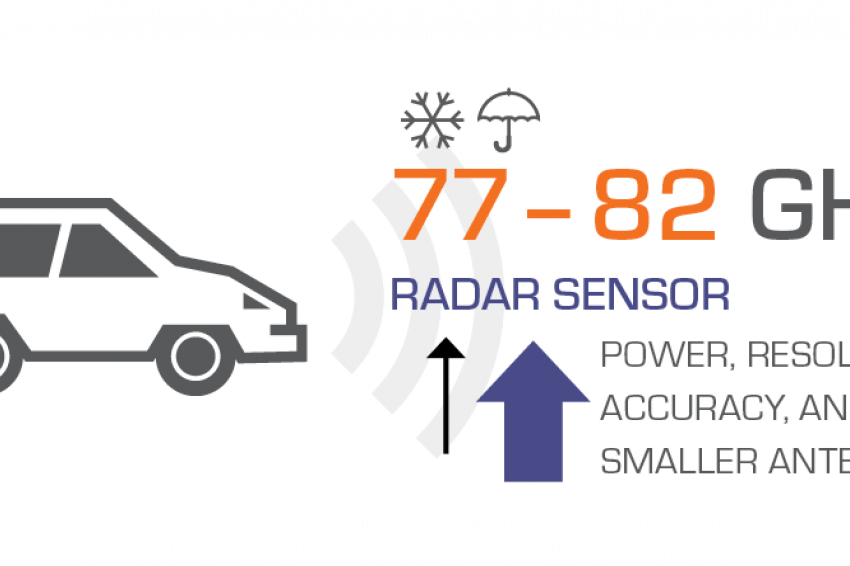
Ob GPS, Kameras, Radare, Beschleunigungsmesser oder Gyroskope: Testsysteme müssen in der Lage sein, eine Vielzahl von I/Os (wie Video-, CAN- oder RF-Signale) zu bewältigen. Zudem entwickeln sich die Sensoren stetig weiter und verändern sich. Radarsensoren, die für die wetterunabhängige Hinderniserkennung eingesetzt werden, nutzen, zum Beispiel, zunehmend Frequenzen von 77 bis 82 GHz, anstelle der bisherigen 24 GHz, da so kleinere Antennen, größere Bandbreiten und eine höhere Sendeleistung möglich sind, was wiederum die Genauigkeit und Objektauflösung verbessert. Eine Alternative zu Radar- sind Lidar-Sensoren, die jedoch in der Regel teuer sind und bei ungünstigen Wetterverhältnissen nicht die nötige Zuverlässigkeit bieten. Allerdings wird derzeit an der Entwicklung von Lidar-Sensoren auf Halbleiterbasis gearbeitet, was die Technologie langfristig kostengünstiger machen soll. Darüber hinaus hat Ford bereits Tests mit Lidar-Sensoren durchgeführt, die in der Lage sind, Regen und Schnee zu unterscheiden, wodurch Lidar zu einer Option für selbstfahrende Autos wird.
Herausforderung 2: Schwierigkeiten bei der Synchronisierung
Werden Daten nicht richtig synchronisiert, ist das Fahrzeug nicht in der Lage, die Umgebungsbedingungen exakt abzubilden. Dies stellt ein Sicherheitsrisiko dar. Die Synchronisierung wird dabei von den Sensoren selbst erschwert. Da Sensordaten standardmäßig nicht über Zeitstempel verfügen, nutzen Ingenieure Sensorspezifikationen wie Kamerabildraten, um das Timing per Software zu ermitteln, was jedoch zulasten der Genauigkeit geht. Noch schwieriger wird es bei Hardware-in-the-Loop-Tests (HIL). Hier muss eine synchronisierte Verbindung zwischen dem in Echtzeit ausgeführten mathematischen Modell und beispielsweise einer Kamera hergestellt werden, die möglicherweise auf einer anderen GPU-basierten Verarbeitungsplattform ein simuliertes Szenario aufzeichnet. Um Algorithmen für selbstfahrende Autos zuverlässig zu testen, müssen die für die Kamera simulierten Bilder präzise mit dem ausgeführten Echtzeitmodell und anderen Sensoren synchronisiert werden. Das Testsystem muss daher allen Komponenten eine gemeinsame Zeitbasis zur Verfügung stellen, um die Synchronisierung zwischen Sensor- und Testdaten zu vereinfachen.
Vorbereitung für die Zukunft: Flexible Testsysteme
Mittlerweile ist es nur noch eine Frage der Zeit, bis autonome Fahrzeuge auf den Straßen Einzug halten werden. Die Sensorfusion wird dabei eine Schlüsselrolle für den Erfolg oder Misserfolg dieser intelligenten Fahrzeuge spielen. Die Komplexität der Sensorfusion und damit auch die Herausforderungen beim Testen werden jedoch weiter steigen. Um in Zukunft nicht den Anschluss zu verlieren, sind modulare und flexible Testsysteme erforderlich, die in der Lage sind, neue I/Os zu verarbeiten. Darüber hinaus müssen sie auch eine gemeinsame Zeitbasis zur Verfügung stellen, um die präzise Synchronisierung der verschiedenen Komponenten zu gewährleisten. Einige Technologien erfordern zudem ganz neue Testansätze, wie realistische Over-the-Air-Tests für Fahrzeugradare, anstelle von herkömmlichen kabelgestützten Testverfahren. Zukünftig werden Testingenieure mithilfe von Machine-Learning-Verfahren und intelligenten Algorithmen, die umgehend fehlerauslösende Muster erkennen, in der Lage sein, effiziente Testszenarien zu ermitteln, und damit eine maximale Testabdeckung in kürzerer Zeit erzielen.
Unverzichtbare Grundlage für die Entwicklung autonomer Fahrzeugtechnologien sind Testlösungen, die flexibel an neue Anforderungen angepasst werden können und komplexe Timing- und Simulationsfunktionen unterstützen. Mit einem Testsystem, das mit aktuellen und zukünftigen Technologien Schritt hält, steht der Entwicklung sicherer und intelligenter Fahrzeuge nichts im Wege.
Kontakt
National Instruments Germany GmbH
Ganghoferstrasse 70 b
80339 München
Deutschland
+49 89 741 31 30
+49 89 714 60 35




