Schrittmotoren heben ab
Gestochen scharfe 3D-Bilder vom Mars
-
-
 Abb. 4: Schrittmotoren, die an die harten Anforderungen auf der Marsoberfläche angepasst wurden, treiben die Rotationsachsen der Filterräder und das Fokussiersystem der hochauflösenden Kamera an. (Quelle: Faulhaber)
Abb. 4: Schrittmotoren, die an die harten Anforderungen auf der Marsoberfläche angepasst wurden, treiben die Rotationsachsen der Filterräder und das Fokussiersystem der hochauflösenden Kamera an. (Quelle: Faulhaber) -
 Abb. 3: Das Filterrad rotiert vor den beiden Weitwinkelkameras. Für scharfe Bilder müssen die Objektivfilter exakt positioniert werden. (Quelle: ESA/ATG medialab)
Abb. 3: Das Filterrad rotiert vor den beiden Weitwinkelkameras. Für scharfe Bilder müssen die Objektivfilter exakt positioniert werden. (Quelle: ESA/ATG medialab) -
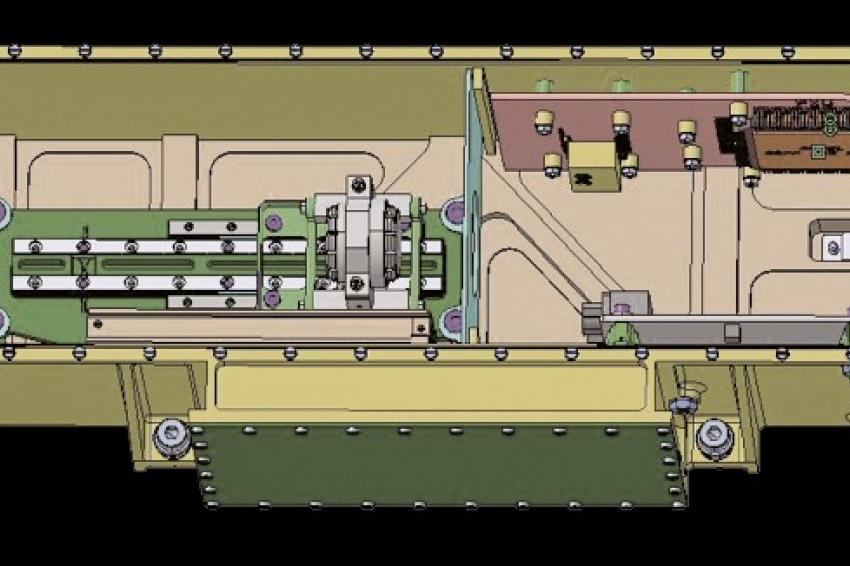 Abb. 2: Die Panoramakamera besteht aus zwei Weitwinkelkameras, vor denen jeweils ein rotierendes Rad mit unterschiedlichen Filtern angebracht ist. Dadurch sind dreidimensionale Panoramaaufnahmen im 300-Grad-Winkel möglich. Eine weitere hochauflösende Kamera liefert dann zusätzliche Detailaufnahmen. (Quelle: ESA/ATG medialab)
Abb. 2: Die Panoramakamera besteht aus zwei Weitwinkelkameras, vor denen jeweils ein rotierendes Rad mit unterschiedlichen Filtern angebracht ist. Dadurch sind dreidimensionale Panoramaaufnahmen im 300-Grad-Winkel möglich. Eine weitere hochauflösende Kamera liefert dann zusätzliche Detailaufnahmen. (Quelle: ESA/ATG medialab) -
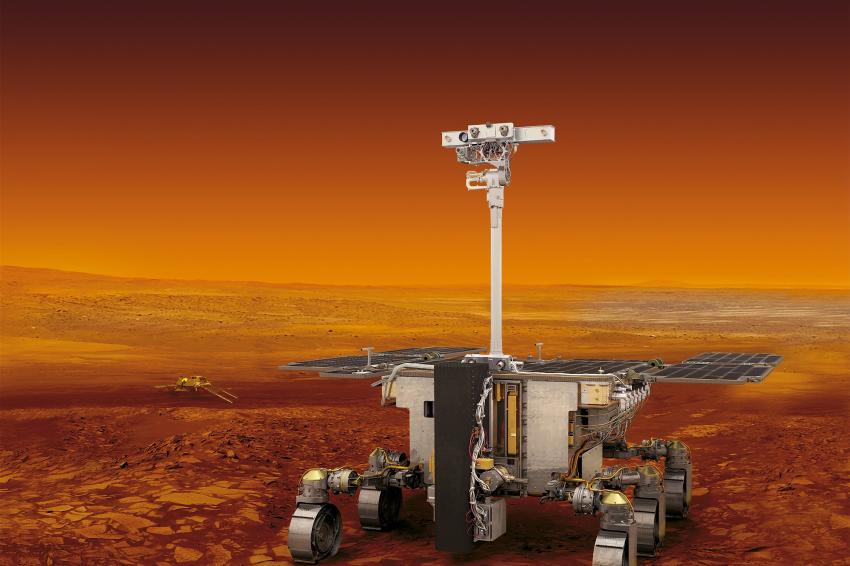
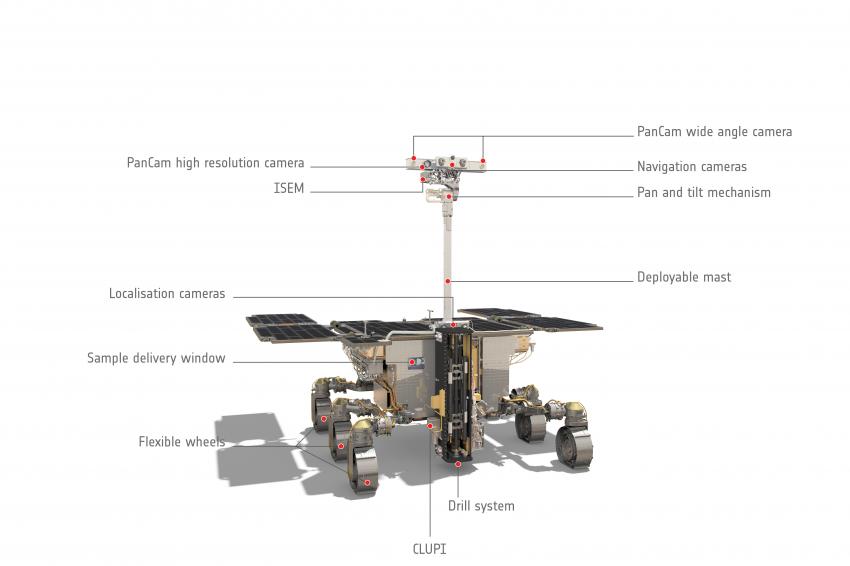 Abb. 1: Der ExoMars Rover soll nach der Landung nach biologischen Aktivitäten auf dem Mars suchen. Das Kamerasystem ist auf einem 2 m hohen Mast montiert (Illustration Stand 15.03.2017, Quelle: ESA/ATG medialab)
Abb. 1: Der ExoMars Rover soll nach der Landung nach biologischen Aktivitäten auf dem Mars suchen. Das Kamerasystem ist auf einem 2 m hohen Mast montiert (Illustration Stand 15.03.2017, Quelle: ESA/ATG medialab)
Im Jahr 2020 soll eine neue Rover-Mission zum Mars starten. Der gemeinsam von der ESA und Roskosmos entwickelte ExoMars Rover soll unter anderem Stereo-Panoramaaufnahmen und hochaufgelöste Bilder zur Erde senden. Zur präzisen Fokussierung und zur exakten Positionierung von Filterrädern werden dann unter Extrembedingungen hochpräzise und besonders robuste Schrittmotoren eingesetzt.
Der Start des nächsten Rover-Expedition auf dem Mars ist für 2020 geplant. Dazu wird die Hauptnutzlast der russischen Proton-Rakete aus dem von den europäischen und russischen Weltraumorganisationen (ESA & Roskosmos) entwickelten ExoMars Rover bestehen. Das Fahrzeug soll nach der Landung nach biologischen Aktivitäten suchen. Ein wichtiges Messgerät dafür ist eine Panorama-Kamera, die Stereoaufnahmen des roten Planeten liefern wird. Die sogenannte PanCam besteht aus zwei Weitwinkelkameras, vor denen jeweils ein rotierendes Rad mit unterschiedlichen Objektivfiltern angebracht ist. Dadurch sind dreidimensionale Panoramaaufnahmen im 300-Grad Winkel möglich. Eine weitere Kamera mit hoher Auflösung liefert zusätzliche Detailaufnahmen, z.B. von geologischen Strukturen und Bodenproben. Schrittmotoren, die an die harten Anforderungen auf dem Mars angepasst wurden, treiben die Rotationsachsen der Filterräder und das Fokussiersystem der hochauflösenden Kamera an.
Die Ansprüche an Technik, die im Weltraum eingesetzt wird, sind hoch und die Umgebungsbedingungen auf dem Mars fordern den am ExoMars Rover eingesetzten Komponenten Höchstleistung ab. Zum einen arbeitet der Rover nach der Landung bei einem Luftdruck von nur 0,00636 Bar, was auf der Erde dem atmosphärischen Druck in 35 Kilometern Höhe entspricht. Gleichzeitig schwanken die Temperaturen zwischen etwa +20 °C und -120 °C. Hinzu kommen Beeinträchtigungen durch den Staub, den der Rover beim Fahren und bei geologischen Bohrungen aufwirbelt. Die Panoramakamera (Abb. 2), die vom Mullard Space Science Laboratory (MSSL-UCL, südlich von London) in Zusammenarbeit mit der OHB System AG (München), dem Deutschen Zentrums für Luft- und Raumfahrt (DLR, Berlin) und Thales Alenia Space (TAS-CH, Zürich) entwickelt wurde, ist deshalb an einem zwei Meter hohen Mast und damit deutlich über dem Boden montiert (Abb. 1).
Schrittmotoren für Objektivfilter und Fokusverstellung
Mit den vor den Weitwinkelkameras liegenden Objektivfiltern (Abb. 3) hat MSSL ein System geschaffen, das während der für 2020 geplanten Mission Aufnahmen mit unterschiedlicher Polarisation und damit Bilder mit variierenden Inhalten erzeugt. Es ist geplant, täglich zehn Bilder zur Erde zu schicken. Was auf den ersten Blick recht wenig klingt, entpuppt sich in der Praxis durchaus als anspruchsvoll: Zunächst erstellt die Kamera für jedes Bild drei Aufnahmen. Diese werden dann jeweils zur Erde geschickt und dort für das endgültige Bild übereinandergelegt. Mehr als zehn Bilder pro Tag sind aufgrund der geringen Datenbandbreite der Funkkommunikation zwischen den Mars und Erde nicht möglich. Jedes Funksignal zwischen den benachbarten Planeten ist zudem ungefähr 20 Minuten unterwegs.
Elf Objektivfilter pro Rad ermöglichen es den PanCam-Weitwinkelkameras unterschiedliche Aufnahmen mit veränderten Polarisationen zu machen. Die Filterräder rotieren und müssen für scharfe Bilder exakt in Position gebracht werden. Als Antrieb setzt MSSL an jeder Achse einen Schrittmotor aus dem Precistep Schrittmotor-Portfolio von Faulhaber ein. Für diese Wahl sprachen gleich mehrere Gründe: Die MSSL-Ingenieure waren bei der Entwicklung der Panoramakamera auf der Suche nach Motoren, die unter Marsbedingungen verlässlich und präzise positionieren und dazu auch noch sehr klein bauen. Schrittmotoren empfehlen sich für diese außergewöhnliche Applikation außerdem, weil sie ohne Positionsrückmeldung je nach Ausführung mit einer Auflösung von bis zu 1280 Schritten pro Umdrehung genau positionieren und in der Handhabung deutlich einfacher und robuster sind als klassische Servomotoren.
Auch der Fokussiermechanismus der hochauflösenden Kamera wird deshalb von einem solchen Precistep Schrittmotor angetrieben. Der Rotor besteht aus einem Kunststoffträger für 10 bis 12 magnetische Polpaare, je nach Motorausführung. Das große Magnetvolumen garantiert ein hohes Drehmoment. Der Motor folgt exakt dem außen angelegten Feld, ohne dass er dafür aufwändig geregelt werden muss. Der Schrittmotor ist somit die ideale Lösung für diese optische Anwendung, da er die Objektiveinstellung dank seines Rastmoments auch ohne Strom halten kann. Zudem werden durch die Ansteuerung im offenen Regelkreis Jitter (Servozittern) vermieden; so entstehen sehr scharfe und klare Bilder.
Spezielle Anpassung an extreme Bedingungen
Die an den Rotationsachsen im Filterwechselsystem der PanCam eingesetzten zweiphasigen Schrittmotoren der Serie AM1020 beispielsweise messen im Durchmesser lediglich 10 Millimeter, sind knapp 16 mm lang und liefern ein Drehmoment von 1,6 mNm. Sie arbeiten mit einer Auflösung von 20 Schritten pro Umdrehung und sind mit einem Präzisionsgetriebe gleichen Durchmessers kombiniert, das eine Übersetzung von 64:1 liefert.
In enger Engineering-Zusammenarbeit mit MSSL haben die Antriebsspezialisten die Motoren zudem für den kommenden Einsatz auf der Marsoberfläche entsprechend angepasst. Hierzu zählen zum Beispiel ein vakuumtauglicher Trockenschmierstoff sowie angepasste Sinterlager. Die Motoren müssen auf dem Mars überleben können, und damit später nach der Landung nichts dem Zufall überlassen bleibt, testet das Mullard Space Science Laboratory die Komponenten der Panoramakamera aktuell in einer Versuchsumgebung. Die Rahmenbedingungen bei den Tests gehen dabei noch über die Verhältnisse auf dem Mars hinaus. Die Antriebe müssen 5.000 Zyklen positionieren und dabei wechselnden Temperaturen zwischen -130 und +50 °C ertragen.
Aber nicht nur im Weltraumeinsatz muss Antriebstechnik hohe Anforderungen erfüllen. In anderen Industriebereichen, wie zum Beispiel der Medizintechnik, dem Transportwesen, der Militärtechnik oder in Kernkraftwerken sind die Anforderungen vergleichbar. Was sich also in Luft- und Raumfahrt bewährt, bietet deshalb auch für solche Einsatzbereiche gute Voraussetzungen. Hohe Zuverlässigkeit, wenig Gewicht, hohe Leistungsdichte, geringes Trägheitsmoment, hochgenaues Positionieren und geringer Stromverbrauch sind schließlich in vielen Anwendungen gewünscht. Anforderungen wie Vakuumtauglichkeit, Verträglichkeit hoher Temperaturunterschiede, Robustheit gegen Vibrationen und hohe Beschleunigungen können die Kleinstantriebe natürlich genauso erfüllen.
Kontakt
Dr. Fritz Faulhaber GmbH & Co. KG
Daimlerstr. 23/25
71101 Schönaich
07031/638-0
07031/638-100