
Motorsteuerung für modulare Mehrachssysteme
Miniaturisiertes OEM-Positioniersteuerungs-Modul für die Integration in einachsige oder mehrachsige Motion-Control-Systeme

Vor allem Operationsroboter, Analysegeräte der Medizinal- und Labortechnik sowie Multileaf-Kollimatoren in der Bestrahlungstechnik sind auf miniaturisierte Antriebssysteme angewiesen, die aufgrund ihres hohen Wirkungsgrades dicht gepackt installiert werden können. Maxon DC- und BLDC-Motoren kombiniert mit Getrieben und integrierten Encodern zur Positions- und Drehzahlerfassung können für solche Anwendungen eine ideale Lösung sein. Zum Antriebspaket gehören auch Motorsteuerungen, die idealerweise direkt im Gerät dicht bei den Motoren und Sensoren integrierbar sind.
Eine übergeordnete Master-Steuerung dient der Koordination der einzelnen Antriebsbewegungen, dem Informationsaustausch mit dem Anwender (User-Interface) und auch der Datenverarbeitung und der Vernetzung mit der ERP-Software. Je nach Anwendung kann es sich beim Master um eine SPS, einen programmierbaren Mehrachscontroller, einen PC oder Microcontroller-basierende Lösungen handeln.
Im Fokus: Miniaturisierte Motorsteuerungen
Wichtige Merkmale der Motorsteuerungen sind eine hohe Energieeffizienz sowie eine hohe Leistungsdichte für die platzsparende (gepackte) Integration aller Komponenten. Ebenso bedeutend sind Anschlüsse für diverse Sensoren und Aktoren sowie eine schnelle Busschnittstelle. Die Anschlusstechnik wird somit häufig zum Schlüssel oder auch Handicap für die platzsparende Integration von Standardlösungen. Es gilt hierbei, einen praxistauglichen Schnitt zwischen Funktionalität und Anschlusstechnik auf Hardware-Ebene zu finden. Die Epos4-Micro-Module bieten einen standardisierten Funktionsumfang, modernste Regleralgorithmen, eine kompakte Leistungsendstufe sowie eine CANopen- oder Ethercat-Busschnittstelle – und sind dabei ähnlich groß wie eine Briefmarke (ab 32 x 22 mm).
Gerätehersteller können die Plug-in-Module in der eigenen Elektronik oder einem Motherboard in der benötigen Achsanzahl integrieren und mit der gerätespezifischen Anschlusstechnik und zusätzlicher Funktionalität kombinieren. Maxon steht bei Bedarf als Engineering-Partner für die Entwicklung solcher Elektronikboards zur Verfügung. Die Epos4 Micro ist eine in hohen Stückzahlen produzierte Industriekomponente (COTS = commercial-off-the-shelf) und minimiert somit den kundenseitigen Entwicklungsaufwand und das Entwicklungsrisiko. Jedes Micro-Modul enthält die komplette Hardware und Software für die Ansteuerung und Regelung eines bürstenbehafteten oder bürstenlosen Motors sowie die Buskommunikation. Dies ermöglicht kostenoptimierte Mehrachssysteme mit kompakten Abmessungen, vereinfachter Montage und Verdrahtung aller Anlagenkomponenten in der Produktion wie auch im Servicefall.
Busschnittstelle als Rückgrat des Gesamtsystems und des IIoT
Über die Busschnittstelle werden von jeder Antriebseinheit mit dem Master-Controller die Daten für die koordinierte Bewegung der einzelnen Achsen ausgetauscht und Informationen für die Wartung und IIoT-basierende Systemkonzepte zur Verfügung gestellt. Gängige Feldbussysteme in der Robotik und dem Geräte-/Anlagenbau sind hierbei CANopen und Ethercat. Ethercat bietet aufgrund hoher Übertragungsraten insbesondere Vorteile bei komplexen Mehrachsanwendungen, besitzt aber den Nachteil zusätzlich notwendiger Hardware und des großen, standardisierten RJ45-Anschlusssteckers bei der Kopplung als Einzelachsen. Die Baugröße der Steuerung und Anschlusstechnik, welche im Maschinenschaltschrank kein Problem darstellt, kann insbesondere bei Handgeräten und der Robotik teilweise zum Killerkriterium für Ethercat werden. Bei EposS4 Micro Ethercat wurde deshalb die platzsparende Ethercat-Integration und Anschlusstechnik für mehrachsige Systemlösungen bereits bei den Entwicklungsanforderungen ins Pflichtenheft geschrieben und eine Lösung gefunden.
Kostengünstige und platzsparende Ethercat-Kopplung
Bei Ethercat werden induktive Übertrager (in diesem Zusammenhang so genannte Magnetics) eingesetzt, um DC-Signalkomponenten aufgrund von Potentialunterschieden auszublenden sowie Störungen zu unterdrücken und die Signalintegrität sicherzustellen. Bei den Magnetics handelt es sich entweder um separate Komponenten oder sie sind im Ethercat-Stecker integriert. Sowohl die Magnetics-Komponenten als auch der RJ45-Stecker benötigen auf der Leiterplatte viel Bauraum und sind kostentreibend, sofern sie für jeden einzelnen Achscontroller und Ethercat-Netzwerkknoten integriert werden müssen.
Bei Applikationen mit mehreren modularen Motorsteuerungen auf einem gemeinsamen Motherboard ist die Ethercat-Kopplung via Magnetics jedoch nicht zwingend notwendig. Es besteht die Möglichkeit, die Ethercat-Ports der einzelnen Controller intern über eine kapazitive Kopplung, das heißt Kondensatoren zu verbinden. Voraussetzung hierfür sind kurze Leiterbahnen (typ. max. 10 cm) zwischen den Ethercat-Anschlüssen sowie keine Potentialunterschiede in der Logikversorgung der einzelnen Steuerungen. Es bietet sich hier innerhalb eines Elektronikboards die Möglichkeit einer kostengünstigen und platzsparenden kapazitiv gekoppelten Ethercat-Vernetzung zwischen den einzelnen Epos4-Micro-Motorsteuerungen unter Einhaltung dokumentierter Designregeln. So werden nur noch für den externen Ethercat-Anschluss RJ45-Stecker benötigt.
Epos4 Micro Ethercat unterstützt die kapazitive interne Ethercat-Kopplung wie auch die externe Kopplung mittels Magnetics. Auf dieser Basis können Multiachs-Boards mit aufgesteckten Epos4-Micro-Modulen realisiert werden, was sowohl Kosten als auch Baugröße reduziert. Maxon bietet nach diesem Prinzip einen extrem kompakten Multiachscontroller mit 90 x 56 mm Baufläche (entsprechend der Größe einer Visitenkarte), bestückt mit drei Epos4-Micro-24/5-Ethercat-Modulen an.
Einfache Integration
Der Datenaustausch und die Kommandierung erfolgt bei der Epos4 Micro (abhängig vom gewählten Produkttyp) über CANopen oder Ethercat und folgt dem CiA 402 Protokoll (Device Profile for Drives and Motion Control). Unterstützt werden die standardisierten Betriebsarten PPM – Profile Position Mode, PVM – Profile Velocity Mode, HM – Homing Mode, CSP – Cyclic Synchronous Position, CSV – Cyclic Synchronous Velocity sowie CST – Cyclic Synchronous Torque. Als standardisierter Motion Control Slave kann Epos4 Micro (wie alle Epos4-Varianten) in die Systemmanager-Tools und Motion Libraries von verschiedenen SPS-Herstellern eingebunden werden.
Bei Anwendungen ohne Bedarf für einen schnellen, zyklischen Datenaustausch im Millisekunden-Takt können auch Windows- und Linux-basierende Systemumgebungen (z.B. PC oder Raspberry Pi) als übergeordnete Systemsteuerungen (= Master) Verwendung finden. Maxons Epos Command Library als spezifische Motion-Control-Funktionsbibliothek beschleunigt hierbei die masterseitige Software-Entwicklung und unterstützt USB-, RS232- und CAN-Schnittstellen für den Datenaustausch.
IIoT ready, multifunktional und leistungsstark
Die Epos4 ist unterster Informationslieferant im IIoT-Umfeld einer Maschine bzw. des Antriebsstrangs. Sie liefert über das Bussystem nach Bedarf Echtzeitdaten wie Motorströme und Drehmomente, Drehzahlen, Positionswerte, Fehlerzustände, Temperatur- und Lastwerte von Steuerung und Motor sowie Sensoren- und Aktorenzustände. Die hohe Bandbreite an unterschiedlichen Daten sowie die Möglichkeit zum schnellen zyklischen Datenaustausch ist die IIoT-Basis für die Prozess- und Produktionsüberwachung und kann auch für die optimierte Instandhaltung (Predictive Maintenance) genutzt werden.
Epos4-Micro-Module reihen sich bezüglich Funktionalität, Bedienung und Software in die Epos4-Baureihe ein. Nur auf wenige Features und einzelne Ein-/Ausgänge wurde aufgrund der höheren Integrationsdichte verzichtet. Die Epos4 Micro besitzt mit 25 kHz Stromreglertakt und 2.5 kHz Drehzahl-/Positionsreglertakt identische Taktraten wie alle anderen Varianten der entsprechenden Produktlinie. Modernste Reglerkonzepte wie Field Oriented Control (FOC), Feed Forward und Observer Control, sowie die Dual-Loop-Regelung erlauben auch bei Epos4 Micro eine maximale Motorleistung und Bewegungspräzision abgestimmt auf unterschiedliche Anwendungsanforderungen, Antriebsmotoren und Sensoren. Die Dual-Loop-Regelung mit einem Inkrementalgeber auf der Motor- und einem SSI-Absolutgeber auf der Abgangswelle ermöglicht eine präzise lastseitig bezogene Positionierung auch bei spielbehafteten oder elastischen Antriebssystemen. Die Inbetriebnahme und das Regler-Tuning werden durch verschiedene Wizards der Epos-Studio-Software unterstützt.
Epos4 Micro unterstützt bürstenbehaftete und bürstenlose DC-Motoren mit Hallsensoren, Digital-Inkrementalgebern und SSI-Absolutgebern. Bei definiert montierten SSI-Absolutgebern auf der Motorwelle (wie bei Maxon Motorkombinationen üblich) ist ein Betrieb von EC-Motoren ohne Hallsensoren möglich.
Insgesamt fünf digitale Eingänge, drei digitale Ausgänge, zwei analoge Eingänge (±10 V) und ein analoger Ausgang (±4 V) erlauben die Anbindung und Auswertung achsbezogener Sensorik, wie zum Beispiel von End- und Referenzschaltern. Die Kommandierung des Drehmoment- oder Drehzahlreglers ist alternativ zum Bussystem ebenfalls über ein analoges Signal möglich. Epos4 Micro bietet eine Leistungsdichte >50 W Spitzenleistung pro cm2 Baufläche ohne Kühlkörper und ohne aktive Kühlung. In der Praxis bedeutet dies bei einem Flächenbedarf für Controller und Leistungsendstufe von 32 x 22 mm (Epos 24/5 Micro CAN) und 7 mm Dicke eine Motorspannung von 24 V und 5 A Dauerstrom sowie 15 A Spitzenstrom während 10 Sekunden (entsprechend 360 W). Dies bei einer Umgebungstemperatur von -30 °C bis 45 °C ohne zusätzliche Kühlung. Bei entsprechendem Derating des Ausgangsstroms sind Umgebungstemperaturen von über 60 °C im Betrieb möglich. Die Temperatur der Leistungsendstufe wird mittels Sensor überwacht und der Motor durch eine I2t-Überwachung vor Überlast geschützt.
Die vorhandenen digitalen und analogen Ein- und Ausgänge sind frei konfigurierbar und auf die Funktionen und Betriebsarten der CiA 402-(CoE)-Positioniersteuerung abgestimmt. Die Inbetriebnahmesoftware Epos-Studio bietet mit dem Startup Wizard eine geführte Grundkonfiguration sowie ein automatisches Tuning aller Reglerparameter, auch für komplexe Dual-Loop-Reglerstrukturen. Das Reglerverhalten sowie relevante Prozessgrößen können mit dem integrierten Datenrecorder von Epos-Studio in der Anwendung aufgezeichnet und beurteilt werden. Für erste Tests bereits ohne eigenes Motherboard-Design steht ein anschlussfertiges Evaluation-Board zur Verfügung. Ein umfangreiches Zubehörangebot sowie die ausführliche Produktdokumentation ergänzen das Angebot.
Autor
Jürgen Wagenbach,
Leiter Customer Support Motion Control
© Bilder: Maxon Motor
-
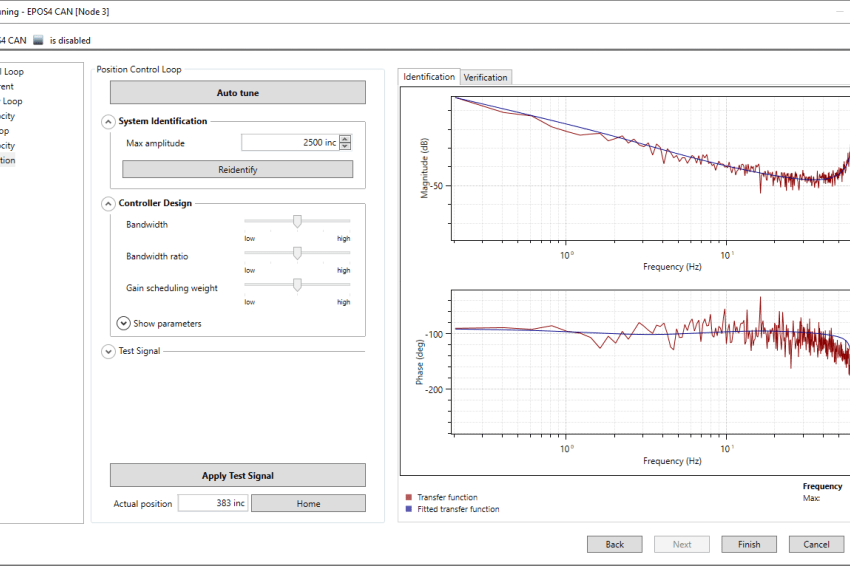 Epos Studio: Dual-Loop Regulation Tuning
Epos Studio: Dual-Loop Regulation Tuning
Kontakt
maxon motor gmbh
Truderinger Str. 210
München



