Mit geschärftem Blick
Das Thema Bildverarbeitung in der dritten Dimension ist an sich nicht brandneu - dafür aber topaktuell. Die Technik scheint nun endgültig den Kinderschuhen entwachsen zu sein und hält Einzug in zahlreiche industrielle Applikationen. Welche Verfahren und Komponenten hierbei zum Einsatz kommen, erklärt 3D-Spezialist Tobias Henzler von Stemmer Imaging.
Die dreidimensionale Inspektion und Vermessung von komplexen 3D-Freiformflächen zählt zu den derzeit größten Herausforderungen für die Bildverarbeitung. Zeitgleich bietet sie neue Möglichkeiten und Potentiale. Bei den heute bereits realisierten Anwendungen zur 3D-Bildverarbeitung werden hauptsächlich vier Verfahren eingesetzt, die sich jeweils durch individuelle Stärken und Einsatzschwerpunkte auszeichnen. Geometrische, winkelbasierte Verfahren stellen die Grundlage für die Laser-Triangulation, die Stereo-Vision und die Streifenlichtprojektion dar, während Time-of-Flight-Systeme zeitbasierend arbeiten.
Laser-Triangulation: feine Beleuchtung
Bei der Laser-Triangulation werden Linienlaser als Beleuchtungs-Quellen eingesetzt, um eine dünne Linie auf das Prüfobjekt zu projizieren. Eine in einem bekannten Winkel zur Projektionsebene des Lasers angeordnete Kamera nimmt die 2D-Bilder der Laserlinie auf, die aufgrund der Objektgeometrie im Kamera-Bild versetzt erscheint. Während sich der Prüfling unter der Laserlinie hindurchbewegt, werden in schneller Bildfolge aus dem jeweiligen Linienversatz Höhenprofile ermittelt und danach zu einem gesamten 3D-Profilbild des Prüfobjektes zusammengesetzt.
Diese Höheninformationen werden dann in einer sog. 2,5D-Range-Map mit Hilfe des jeweils zugehörigen Grauwerts kodiert. Daraus lässt sich im Anschluss mit einer Kalibriermatrix eine 3D-Punktewolke (Cloud Of Points, COP) errechnen. Einige 3D-Kameras berechnen diese Informationen bereits intern, geben dann komplette 3D-Bilder aus und sparen so die Verarbeitung auf dem Host-Rechner. Bei anderen Systemen werden die Range Maps in einem angeschlossenen PC erzeugt, in dem auch die COPs berechnet werden.
Erst nach der Umrechnung der 2,5D-Range Maps in echte 3D-Punktewolken ist ein Ausgleich von Positions- und Rotationsabweichungen der Objekte in allen sechs Freiheitsgraden möglich. Somit ist es nicht mehr notwendig, die Prüfobjekte hochgenau mechanisch auszurichten oder zuzuführen. Diese Vorgehensweise reduziert den mechanischen Aufwand deutlich und garantiert einen hohen Durchsatz bei einer 100%-igen Kontrolle.
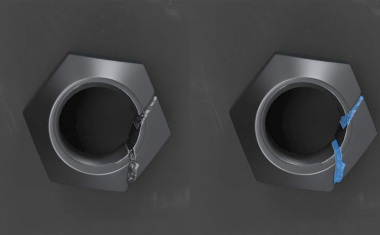
Wesentliche Voraussetzung für die Durchführbarkeit von Lichtschnitt-Verfahren ist, dass sich das Prüfobjekt relativ zu Kamera und Laser-Beleuchtung bewegt. Eine der Herausforderungen bei der Laser-Triangulation stellen die sog. Abschattungen dar: Je nach Oberflächenform kann die Laserlinie von höheren Objektmerkmalen verdeckt werden. Somit können in diesen Fällen keine Höheninformationen mehr von den dahinter liegenden Strukturen erkannt werden. Fehler an solchen abgeschatteten Stellen wären somit für die Kamera unsichtbar.
Lösen lässt sich dieses Problem durch die Verwendung mehrerer Kameras, die die Laserlinie aus unterschiedlichen Winkeln betrachten und die unterschiedlichen Datensätze dann zu einem gemeinsamen Höhenprofilbild zusammenfassen. Objektdaten fehlen bei Anwendung dieser Technik nur dann, wenn sie in keinem der Eingangsdatensätze vorhanden sind. Die Zusammenfassung von Daten aus mehreren Kameras zählt für moderne Software-Werkzeuge wie Merge 3D aus der Bibliothek Common Vision Blox von Stemmer Imaging zu den Standardaufgaben.
Stereo-Vision: Mit zwei Augen sieht man besser
Der Mensch sieht mit zwei Augen. Auf dieses Prinzip setzt auch das geometrische Verfahren der Stereo-Vision. Zwei Kameras nehmen zwei 2D-Bilder eines Objekts auf. Im Anschluss wird aus diesen Daten nach dem geometrischen Triangulations-Prinzip ein dreidimensionales Höhenbild berechnet. Auch diese Technologie erlaubt eine Bewegung der zu prüfenden Objekte während der Bildaufnahme.
Allerdings sind für die Anwendung der Stereo-Vision Referenz-Marken oder zufällige Muster auf dem Objekt Voraussetzung, um jeden Objektpunkt des Prüflings eindeutig je einem Pixel in den beiden 2D-Bildern zuordnen zu können. Aus diesem Grund eignet sich das Verfahren in der Regel nicht für den Einsatz im Produktionsumfeld. In der Koordinatenmesstechnik, der 3D-Vermessung von Objekten und Arbeitsräumen für Applikationen mit Industrie-, Service-oder mobilen Robotersystemen sowie bei der 3D-Visualisierung von für den Menschen gefährlichen oder unzugänglichen Arbeitsräumen ist es hingegen häufig zu finden.
Streifenlichtprojektion: Ruhende Objekte vor der Linse
Im Gegensatz zu Laser-Triangulation und Stereo-Vision erfordert die 3D-Bildverarbeitung auf Basis der Streifenlichtprojektion ruhende Objekte. Dabei wird kodiertes Licht, z.B. mit Hilfe von Mikro-Projektoren, auf das Objekt gestrahlt. Das streifenförmig auf das Objekt projizierte Licht ergibt in Abhängigkeit von dessen Höhenstruktur ein Lichtmuster auf dem Objekt, das von einer in bekanntem Winkel angeordneten Kamera aufgenommen wird.
Im Gegensatz zu einem Laserscanner, bei dem die maximale Lichtintensität der Linie über mehrere Kamera-Pixel hinweg ausgewertet wird, erlaubt die Streifenlichtprojektion die Auswertung der Lichtintensität in jedem einzelnen Kamera-Pixel. Dies führt zu einer Verbesserung der maximal erreichbaren Höhenauflösung solcher Systeme im Vergleich zu Laserscannern um mehr als den Faktor 2 und erlaubt laut Gottfried Frankowski, Geschäftsführer von GFMesstechnik und Mitentwickler dieser Technologie, Höhenauflösungen bezogen auf die Abtastlänge im Bereich von größer 1:10.000.
Time of Flight: Im Wettlauf mit dem Licht
3D-Kamera-Systeme auf Basis des Laufzeitverfahrens (englisch: Time of Flight, ToF) funktionieren zeitbasiert: Mit einem Lichtpuls wird die Szene ausgeleuchtet und ToF-Kameras messen für jeden Bildpunkt die Zeit, die das Licht bis zum Objekt und wieder zurück braucht. Da die benötigte Zeit direkt proportional zur Distanz ist, liefern diese Kameras somit für jeden Bildpunkt die Entfernung des darauf abgebildeten Objektes. Mit dieser Technik kann somit ein Entfernungsbereich von einigen wenigen bis hin zu rund 40 m mit bis zu 100 Bildern pro Sekunde abgedeckt werden, wobei die Distanzauflösung bei etwa 5-10 cm liegt. Die lateralen Auflösungen können bis etwa 200 x 200 Pixel betragen. Zu einer bekannten Anwendung der Technologie zählt die Bestimmung von LKW-Klassen an LKW-Mautbrücken über Autobahnen. Mit einem schnell scannenden Laserpunkt wird hier ein 3D-Profil der LKWs erzeugt und daraus die Anzahl der Achsen bestimmt. Im industriellen Umfeld eignen sich ToF-Systeme aufgrund ihrer relativ geringen Auflösung nur für gröbere Anwendungen.
Komponenten für die 3D-Bildverarbeitung
Zum Aufbau von 3D-Bildverarbeitungs-Systemen ist eine Auswahl aufeinander abgestimmter Komponenten erforderlich. Hier hat sich das Angebot an Hard- und Software-Komponenten für die 3D-Bildverarbeitung in den vergangenen Jahren deutlich erweitert. So zählen Laser-Beleuchtungen, wie sie z.B. die Unternehmen Coherent, Laser Components, Stocker Yale, Z-Laser Optoelektronik und weitere produzieren, in diesem Bereich zu den am häufigsten eingesetzten Beleuchtungs-Produkten für die Laser-Triangulation. Auch die Auswahl an diversen 3D-Kameras mit unterschiedlichen Basis-Technologien hat inzwischen stark zugenommen. Beispiele dafür sind die 3D-Kameras von Automation Technology, die sich als leistungsfähiges „Auge" für Laser-Triangulations-Systeme im High-End-Bereich bewährt haben, sowie Produkte weiterer Hersteller wie u.a. EyeScan, Sick oder Smartray.
Ebenfalls mit dem Laser-Triangulationsverfahren arbeiten die intelligenten 3D-Sensoren namens Gocator des kanadischen Herstellers LMI. Sie stellen für grundlegende Aufgaben zur 3D-Vermessung eine interessante Lösung dar und erlauben einen schnellen Einstieg in die 3D-Profil-Vermessung, da Anwendungen sehr einfach und ohne Programmierung mit Hilfe eines intuitiven Web-Interfaces eingerichtet und realisiert werden können. Auch Leuze und Micro-Epsilon bieten Produkte dieser Kategorie an. Im Bereich der Streifenlichtprojektion hat die Firma VRmagic mit AreaScan 3D Ende 2010 eine vielbeachtete 3D-Kamera vorgestellt. Diese 3D-Flächenkamera eignet sich zur Lösung von Aufgaben zur Lage- und Vollständigkeitskontrolle sowie für Soll-Ist-Vergleiche speziell von komplexen Freiformkörpern. Zudem arbeitet sie auf Basis der modernen Streifenlicht-Projektion mit DLP-Projektoren, die sich zu einer kompakten Technologie mit hohem Potential entwickelt haben.
Optiken, die für 3D-Anwendungen eingesetzt werden, müssen im Vergleich zu 2D-Einsatzfällen erhöhten Anforderungen bezüglich Auflösung und Verzeichnung genügen. Hersteller wie u.a. Fujinon, Kowa, Qioptiqs oder Tamron haben inzwischen jedoch Optiken im Programm, die diesen hohen Anforderungen der 3D-Bildverarbeitung gerecht werden.
Wesentlich für den Erfolg von 3D-Anwendungen ist nicht zuletzt die eingesetzte Software. Sie muss bereits geringfügige 3D-Abweichungen in Echtzeit schnell und genau erkennen, um eine schnelle Gut-/Schlecht-Entscheidung über das geprüfte Objekt treffen zu können. Common Vision Blox (CVB) von Stemmer Imaging zählt hier zu den bekannten und leistungsfähigen Bibliotheken mit Werkzeugen für die 3D-Bildverarbeitung. Basis der CVB-3D-Tools sind dabei die Algorithmen der spanischen Software-Schmiede Aqsense, die Software für die 3D-Bildaufnahme und Verarbeitungs-Technologien für die 100%-ige High-Speed-Kontrolle in 3D entwickelt. Weitere Software-Pakete mit 3D-Algorithmen bieten Halcon von MVTec oder Scorpion von Tordivel.
3D macht vor keiner Anwendung Halt
Für die Logistikbranche hat das Unternehmen Wiesbadener Eckelmann ein System zur schnellen 3D-Inspektion von Mehrwegbehältern realisiert. Diese Behälter müssen regelmäßig kontrolliert werden, da Beschädigungen oder Verschmutzungen ihre Wiederverwendbarkeit beeinträchtigen. Industrielle Bildverarbeitung in Form von zwei 3D-Hochgeschwindigkeitskameras von Automation Technology sowie sieben weitere konventionelle Flächenkameras helfen hier, die Behälterinspektion effizient zu automatisieren. Unter Verwendung des Lichtschnittverfahrens aufgenommene 3D-Bilder der Behälter werden in Bruchteilen einer Sekunde mit einem Modell der Kiste verglichen, um dann zu entscheiden, ob es sich bei Abweichungen im Bild um tolerierbare Gebrauchsspuren, gravierende Verschmutzungen oder Beschädigungen handelt. Je nach Klassifikation wird der Behälter ausgeschleust und damit dem Behälterkreislauf entzogen.
Auch bei der Vermessung von Kfz-Blechbauteilen findet 3D-Bildverarbeitung Verwendung. Zum Beispiel ermöglicht ein 3D-Messsystem des Braunschweiger Unternehmens GOM Gesellschaft für Optische Messtechnik eine hochpräzise optische 3D-Vermessung von Blechbauteilen. Das System kombiniert hohe Messdatenqualität mit Flexibilität und kann nicht nur im Labor, sondern auch mobil vor Ort im Presswerk und im rauen Produktionsumfeld eingesetzt werden. Dabei können für unterschiedliche Objektgrößen präzise 3D-Koordinaten erzeugt und komplette Mess- und Prüfberichte geliefert werden. Bis vor kurzem konnten scharfe Kanten nur mit berührenden Messtastern vermessen werden, da sich diese mit optischen Digitalisiersystemen nur unbefriedigend vermessen ließen. Aufgrund der kompletten Entwicklung von Sensor, Mess- und Inspektions-Software im eigenen Haus kann das GOM-System auch scharfkantige Merkmale zuverlässig mit Subpixel-Genauigkeit vermessen.
Auch in der Lebensmittelindustrie hält 3D-Bildverarbeitung Einzug. Stemmer Imaging hat in England ein System konzipiert und aufgebaut, mit dem das Gewicht von Käse, Würsten oder Fleisch durch die Messung des Volumens berechnet werden kann. Nach Erreichen des gewünschten Gewichts kann dann eine Schneidemaschine die Lebensmittel den Anforderungen entsprechend schneiden. Zu den Hauptproblemen zählte dabei zum einen, dass z.B. Würste nie durchgängig zylindrisch sind. Zum anderen kann das komplette Profil einer Wurst nur über mehrere Höhenprofile errechnet werden, sodass in dieser Anwendung drei Kameras eingesetzt wurden, deren Bilder anschließend ohne Überlappung der Messbereiche zu einem 360°-Bild umgerechnet werden mussten. Durch den Einsatz der Programmierbibliothek Common Vision Blox (CVB), Kameras von Teledyne Dalsa sowie geeigneter Laser-Beleuchtungen, Optiken und Bildverarbeitungs-Kabel konnte diese Aufgabe elegant gelöst werden.