A Tremendous Potential...
Thanks to the GigE-Vision standard, standard Gigabit-Ethernet components can be used in Machine Vision and are already successfully being employed in multiple vision applications. However, the GigE technology can offer more: new topologies make the data stream simultaneously available to various receivers and reaction times can be reduced.
The Ethernet technology transmits large amounts of data over great distances with utmost security and at reasonable prices. This could be achieved through comprehensive knowledge in the fields of communications engineering, HF technology and information technology. Thus, Ethernet is an example of how research and professional engineering skills from diverse disciplines combined to allow broad use. In the last few years, the question of applicability for heavy-duty Industrial Machine Vision tasks always took center stage during passionate discussions about interfaces. Closely linked to these debates is the question of the "real-time" requirement, or rather "in-time" requirement which gets to the core of what was really meant. In all digital bus technologies (USB2, IEEE1394 and also GigabitEthernet) pixel information is transported quasi serially and transmitted to the machine vision system. At first, there is no edge-related connection to the image sensor signals. But this is not disadvantageous over the classical analog or digital frame grabber systems but instead opens the floodgates to a variety of new possibilities.
Take Nature as an Example
Nature serves as a good model for machine vision. Let's take an everyday situation to illustrate the chronological sequence from image processing right up to action. When a car driver meets an obstacle, they first have to realize the situation, then to analyze it and finally to make a decision. At the end of such a reaction chain he or she will determine the pressure to operate the foot brake. Stopping in front of the obstacle means that the processing chain is "OK" and thus within the range of physics and of human abilities. But, knocking down the obstacle means that the processing chain was "not OK". The processing time was too long or delayed due to physics or performance-related factors such as alcohol, fatigue, distraction. The problem has been solved optimally when the chain "to analyze - to make decisions - to trigger your motor skills" has been optimized in such a manner that there is no "bottleneck" left delaying the required operation. In the light of electronics this means: for processing, the image of a temporarily exactly defined scenario has to be transmitted to the computer's RAM as quickly as possible which is done via PCI bus systems (PCI-X, PCIe) which are no bottlenecks for large-scale camera data streams. This path is used for data transportation by systems equipped with an additional image acquisition board or with the available Gigabit Ethernet technology. This kind of image transmission contest does not put disadvantage to the GigE-Vision camera. So, when the PCI bus is faster than the data rate of image acquisition both technologies are on about the same level which can be seen from figure 1. As can also be seen, more functions have been integrated into current digital GigE-cameras. The camera as master of the vision system now has to manage the function block "A-D conversion", as well as the in-time communication with the outside world. Exact image triggering, light control and maybe also result control are done by the camera system.
In-time Data Processing
Ideally, an image taken at time X is always to be processed at an inspection interval available. GigE-Vision camera manufacturers and software suppliers offer routines for managing the time-to-location reference of an image during the inspection process. It is quite often required to transform a result into an action at an exactly defined location in the machine vision system. To do so, the diverse system frequencies of the encoder, the motor control, and of the PLC have to be considered. As it was the case of frame grabber-based systems, it is an external or internal "time counter" hardware that helps the typical machine vision operating systems to obtain in-time results. Figure 3 illustrates how in-time data processing works. Any further sophistication in the GigE-Vision technology will most certainly lead to interesting solutions in the future.
Double Interface
An optimally set up GigE-Vision connection can transmit about 120MB/s over a distance of 100 m - enough bandwidth to make use of the most current sensors, even high-resolution and high-speed sensors, up to the maximum image rate. Area-scan or line scan sensors with multiple outputs (e. g. 4 x 40 MHz) are a province of the CameraLink interface. Still, this year products with a double GigE-Vision interface will come onto the market. Thus, the Ethernet technology will open up for further fields of application.
Multiple Receivers
Multicasting, another specialty of the GigE-technology makes the data stream available to various receivers. This can be done with standard switches and illustrates flexibility and future potential. The topology of a machine vision application might be such that multiple computers simultaneously work with the images of the part to be examined and that the current live image is visualized on a network display.
It is also possible to combine diverse camera systems. A line scan camera and an area scan camera will acquire images at the same switch within the bandwidth available. Of course, all cameras in the network can operate entirely asynchronously or event-driven.
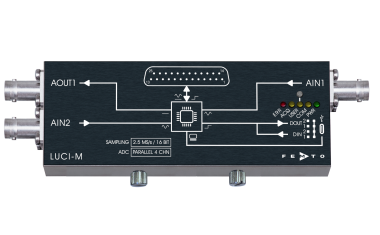
To ensure reliable operation of a new GigE-Vision system even in heavy-duty continuous operation, all general conditions have to be defined in advance as clearly as possible. As in any other acquisition technology, the description of the customer's task defines an approach to a solution comprising camera, illumination, optics and processing technology. Expert knowledge or experience will still be in demand when the topology of a GigE system has to be realized. The market will soon bring out simple and yet flexible combinations of a GigE camera and an "evaluation box" (see fig. 4) which will attract attention due to a surprisingly good price-performance-ratio.
Conclusions
GigE-Vision is already being used effectively and was made ready for the market. Just as today's PCs gained their permanent place in machine vision (MV), the GigE-Vision standard will prevail in future MV applications. Ethernet is also gaining ground in the field of machine control.
Those who work at the somewhat different "cabling concept" of the new topology of their systems will soon discover chances enabling them to offer smart inspection machines with customer value. However, it's beyond dispute that image acquisition boards will maintain their ground. New acquisition boards also arise on the basis of the GigE-Vision interface (e.g. with multiple inputs) which process the image data on the board. Thus, less CPU time is required, or even shorter "in-time" processing can be realized by means of selective measures.